
こんにちは、管理人のturtleです。
本稿はあくまで管理人自身の備忘録として書いており、管理人の好みの形式でまとめているため、歴史的な視点が若干抜け落ちている点、数学書に似た体裁を意識しながらまとめている点、理解度は問わずとも解析力学を学んでいることのある読者を想定している点に注意してください。
なお、本稿は長い記事になっていますが、解析力学をまとめる記事としてはこの稿で完結しているので、ぜひ最後までご覧ください。また、誤りがあれば適宜修正していきます。
第1章―解析力学とはなにか
1 解析力学の利点
解析力学とは、初学者にはニュートン力学の数学的な書き換えとして教えられることが多いです。ところが、はじめに解析力学を学んだ読者なら誰もが、なぜ完成されているようにみえるニュートン力学をわざわざ複雑な形に書き換えるんだという疑問を持つでしょう。
その具体的な答えとしては、解析力学ならではの利点をあげるのがいいですかね。例えば、
- 解析力学では、法則が座標の取り方によらないから、どんな座標系でも数式の形が変わらない
という利点があります。
ニュートンの運動方程式\(m \ddot{\boldsymbol{r}} = \boldsymbol{F}\)を思い出してみましょう。物体の2次元の位置を表現する「座標」が直交座標\(x,y\)であるならば、運動方程式は、\(F_x = m\ddot{x}, F_y = m\ddot{y}\)の2式でしたが、その一方で極座標\(r,\theta\)であるならば、運動方程式は、\(F_r = m(\ddot{r} – r\dot{\theta}^2), F_\theta = m(r\ddot{\theta} + 2\dot{r}\dot{\theta})\)の2式でした。座標の取り方によって、数式の形が大きく変わっているのが分かりますよね。
その一方で、解析力学での原理となる方程式はあとで紹介しますが「一般化座標」というもので書かれているため、座標の取り方によらず数式の形が変わりません。ほかにも、
- 解析力学では、面倒な束縛力を上手に処理して計算できる。
- 解析力学では、古典力学の枠組みを超えて、現代物理学の枠組みへそのまま拡張できる。
とかいう利点もありますが、いま理解しきるのは難しいので、徐々に理解していきましょう。
2 ラグランジュ力学とハミルトン力学
解析力学には大きく分けて「ラグランジュ力学」と「ハミルトン力学」という2つの記述方法があります。どちらも力学を数学的に洗練して、再構築したものになりますが、世界を記述するために採用している根本的な原理と変数の選び方が異なります。
ではいまから、この2つを順にみていきましょう。
第2章―ラグランジュ力学
1 ラグランジュ力学の基本原理
物理学において、証明なしに事実であると認めて、議論のスタートとする命題のことを「原理」とよんでいます。結論から示しますが、ラグランジュ力学は次のことを原理としています。
原理2.1(力学系の状態の記述)
任意の力学系の状態は、マクロに見て\(n\)個の独立な変数\(\boldsymbol{q} = (q_1, q_2, \dots, q_n)\)と、その時間微分である速度\(\dot{\boldsymbol{q}} = (\dot{q}_1, \dot{q}_2, \dots, \dot{q}_n)\)、および時間\(t\)によって完全に一意に指定される。
なお、この変数の組\(\boldsymbol{q}\)を一般化座標とよぶこととする。
原理2.2(ラグランジアンの存在)
任意の力学系には、その系の自由度や対称性、相互作用などといった性質を完全に決定づける状態量\(L\)が存在し、\(L\)は系の一般化座標\(\boldsymbol{q}=(q_1,q_2,…,q_N)\)、一般化速度\(\dot{\boldsymbol{q}} = (\dot{q}_1, \dot{q}_2, \dots, \dot{q}_n)\)、および時間\(t\)の関数として、\(L = L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t)\)のように表される。
なお、この関数\(L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t)\)をラグランジアンとよぶこととする。
原理2.3(停留作用の原理)
系が時刻\(t_i\)における状態\(\boldsymbol{q}(t_i)\)から、時刻\(t_f\)における状態\(\boldsymbol{q}(t_f)\)へと推移するとき、自然界が実際に選ぶ軌道\(\boldsymbol{q}(t)\)は、以下の作用積分
$$
S=\int_{t_i}^{t_f} L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t) dt
$$を停留させるような軌道である。すなわち実際の運動においては、始点\(\boldsymbol{q}(t_i)\)と終点 \(\boldsymbol{q}(t_f)\)を固定したときの作用の変分\(\delta S\)がゼロになる。
大事なことなのでもう一度いいますが、原理というのは、証明はできないけれどたしかに現実の運動がそれにしたがっているという主張のことで、古典力学におけるニュートンの運動方程式、古典電磁気学におけるマクスウェル方程式みたいなものですね。
今回ラグランジュ力学の議論をはじめるにあたって、以上3つの原理が成り立つことを要請することは、現実を見るに、実際に起こる運動によく整合しているであろうから証明なしに受け入れてしまおうということです。
次の節から、いま要請した原理を一つずつ見ていきましょう。
2 原理2.1の意味
原理2.1で与えた一般化座標というのは、日常的にこれまで用いていた3次元のデカルト座標\((x, y, z)\)を拡張した概念だと思ってもらえれば大丈夫です。
例えば、3次元空間を考えると、位置を指定する方法は直交座標\((x,y,z)\)に限らず、極座標\((r,\theta,\phi)\)や円筒座標\((\rho,\theta,z)\)などさまざまありますが、指定方法が何たるかによらず位置を指定できる3変数の組をまとめて一般化座標と呼ぶということですね。
ただ理論として、デカルト座標ではなく、\(n\)個の独立な変数\(\boldsymbol{q} = (q_1, q_2, \dots, q_n)\)という抽象的な座標の取り方を導入することで、解析力学の最大のメリットである「法則が座標の取り方に依らないこと」や「束縛条件をうまく処理できること」につながります。
例えば、長さ\(l\)の糸の先に重りがついた「振り子」を考えます。
ニュートン力学では、重りの位置を\((x, y)\)の2変数で記述し、糸の長さが\(l\)であるという「束縛条件」と、糸の張力という「束縛力」をわざわざ式に組み込んで方程式を解く必要がありますが、実際には重りは円弧の上しか動けないため、位置を指定するのには「鉛直方向からの角度\(\theta\)」1つで十分ですよね。
一般化座標という概念を理論に組み込むことで、本当に自由な変数だけを\(n\)個選んで力学系を解くこともできるようになります。もちろん、\(\boldsymbol{q}\)は長さである必要はなく、角度でも、面積でも、あるいはもっと抽象的なパラメータでも構いません。
3 原理2.2の意味
これが一番抽象的かもしれませんが、力学系に対してその系の自由度や対称性、相互作用などといった満たしてほしい性質を要請すると、状態量\(L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t)\)の表式が自然にある程度絞られてしまうということです。
といっても伝わらないので、例として、古典力学の要請にしたがって運動する粒子のラグランジアンの表式を絞り込んでみます。ただし、以下で定義する質量\(m\)は、古典力学で一般的に受け入れられている質量と同じものです。
例2.4
古典力学が前提としていた要請にしたがって1次元の方向に運動する、なにからも力を受けない自由粒子について、この粒子のラグランジアン\(L_{\text{free}}\)の表式を絞り込む。\(L_{\text{free}}\)は位置\(x\)と速度\(\dot{x}\)、そして時間\(t\)の関数であって、古典力学が前提としていた要請である、
- 時間の一様性:ラグランジアン\(L_{\text{free}}\)は時刻\(t\)に依存しない
- 空間の一様性:ラグランジアン\(L_{\text{free}}\)は位置\(x\)に依存しない
- 空間の等方性:ラグランジアン\(L_{\text{free}}\)は速度\(\dot{x}\)の符号に依存しない
- ガリレイの相対性原理:止まっている人から見ても、等速で動いている人から見ても、物理法則は同じでなければならない
にしたがう必要がある。まず前者3つから、\(L_{\text{free}}\)は速度の2乗\(\dot{x}^2\)の関数\(L(\dot{x}^2)\)としてかけるべきである。さらに、止まっている人から見た粒子の速度を\(\dot{x}\)とすると、一定の微小速度\(v_0\)で走る電車から見た粒子の速度は\(\dot{x} + v_0\)にみえるので、電車から見た自由粒子のラグランジアン\(L’_{\text{free}}\)は、
$$
L’_{\text{free}} = L_{\text{free}}((\dot{x} + v_0)^2) = L_{\text{free}}(\dot{x}^2 + 2\dot{x}v_0 + v_0^2) \approx L_{\text{free}}(\dot{x}^2) + \frac{\partial L_{\text{free}}}{\partial (\dot{x}^2)} (2\dot{x}v_0)
$$とかけるわけだが、ガリレイの相対性原理より、
$$
\frac{\partial L_{\text{free}}}{\partial q_i} – \frac{d}{dt} \frac{\partial L_{\text{free}}}{\partial \dot{q}_i} =0
\qquad
\frac{\partial L’_{\text{free}}}{\partial q_i} – \frac{d}{dt} \frac{\partial L’_{\text{free}}}{\partial \dot{q}_i} =0
$$のそれぞれから出てくる数式は同じでなくてはならない。ここで、後ほど示す定理より、ラグランジアンに任意の関数\(G(\boldsymbol{q},t)\)の時間微分だけの不定性があっても、オイラー=ラグランジュ方程式の結果は変わらないことを用いると、
$$
L’_{\text{free}} – L_{\text{free}} =\frac{\partial L}{\partial (\dot{x}^2)} (2\dot{x}v_0)
$$が、ある関数の時間微分になっていればよいので、速度\(\dot{x}\)が位置\(x\)の時間微分であることをふまえると、\(\partial L/\partial (\dot{x}^2)\)がただの定数であればよいことになる。この定数を\(m/2\)とおき、粒子に依存する定数\(m\)を質量と定義する。\(\partial L/\partial (\dot{x}^2) = m/2\)について、これを積分することにより、自由粒子のラグランジアンとして、\(L_{\text{free}} = m\dot{x}^2/2\)が採用できるといえる。
さて、こう言った感じで「古典力学の系であっても、電磁場の中を動く荷電粒子の系であっても、特殊相対性理論の世界であっても、さらには量子場の理論の世界であっても、とにかくその系のすべてを記述する関数としての\(L\)が必ず存在する」という宣言をしているのが、原理2.2です。
4 原理2.3の意味
原理2.3も突如出てきた定理にしては複雑すぎるような気がしますが、これについては歴史的な背景もふまえて述べましょう。解析力学が生まれる前、光学の分野において以下の原理が成功をおさめていました。
原理2.5(フェルマーの原理)
光は光学的距離が停留する経路を通る、すなわち、媒質の屈折率\(n(\boldsymbol{r})\)、光線の経路\(\boldsymbol{r}(\lambda)\)(ただし\(\lambda\)は経路に沿った任意のパラメータ)に対して、\(\lambda_i\)から\(\lambda_f\)までの光学的距離\(S\)を
$$
S=\int_{\lambda_i}^{\lambda_f} n(\boldsymbol{r}) |\boldsymbol{r}'(\lambda)| d \lambda
$$と定義すると、現実に光が通過する経路においては、始点\(\boldsymbol{r}(t_i)\)と終点 \(\boldsymbol{r}(t_f)\)を固定したときの光学的距離の変分\(\delta S\)がゼロになる。
難しいことを言っているように見えますが、「すなわち」の後から続く部分はすべて、「光は光学的距離が停留する経路を通る」ということの言い換えです。ここで、光学的距離は到達時間と光速の積ですから、この原理の言っていることは「光は到達時間が停留する経路を通る」ということです。
言っていることはきわめて直感的で自然でしょう。
変分のくだりについては、「その経路を選んだときの光の到達時間が停留するということは、始点\(\boldsymbol{r}(t_i)\)と終点 \(\boldsymbol{r}(t_f)\)を固定したまま経路を微小にずらしたときに、その極限で到達時間は変化しない」ということを言っているわけです。
別に、フェルマーの原理から停留作用の原理が導かれるということではありませんが、この2つの原理の記述は非常に似通っていることが分かるかと思います。
というのは、物理学はこの原理2.5の成功から、古典力学の分野においても「力学系の粒子が現実に選んだ経路において停留する量」が存在するのでは、と類推したためです。この物理量を作用\(S\)と試しにおいてみると、作用\(S\)はどういう形で書けるべきでしょうか。
作用\(S\)は今まで見たことをふまえると、古典力学の系が運動する経路を1つ定めたときにそれに対して出力される量であるので、“経路の評価”としての意味を含んでいますよね。
まず、\(t_i\)から\(t_m\)の部分の作用\(S[t_i , t_m]\)と、\(t_m\)から\(t_f\)の部分の作用\(S[t_m , t_f]\)に対して、これを足し合わせたものが全体の作用になる、つまり\(S[t_i , t_f]=S[t_i , t_m]+S[t_m , t_f]\)とかけることが自然です。
さらに、作用\(S\)は各々の時刻の力学系の状態を含んでいなければなりませんから、作用の増分\(dS\)は、(その瞬間の状態で書ける量)×\(dt\)としてかけることが自然です。(その瞬間の状態で書ける量)の引数として\(\boldsymbol{q}, \dot{\boldsymbol{q}}, t\)をとるとして、この量を\(L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t)\)とかくとき、これらの要求からつくられる時刻\(t_i\)から時刻\(t_f\)までの作用\(S\)は、
$$
S=\int_{t_i}^{t_f} L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t) dt
$$と書けるのが自然ではないでしょうか。
少々天下り的でゴール在りきだと感じたのは当然で、歴史的にはニュートンの運動方程式をふまえながら何度も修正されて、この形にたどり着いています。
そして、ここで出てきた量\(L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t)\)が、実はいままでラグランジアンとして紹介していた物理量であって、「力学系の粒子は作用が停留する経路を通る」というのがまさに原理2.3であるわけです。
注意
以上のような経緯で、停留作用の原理が生まれたわけですが、しばしばこの原理は「粒子が未来の目的地をあらかじめ知っていて、現在地と目的地を結ぶ経路のうちで最も効率的な経路を自ら選んでいる」という、まるで自然に何らかの意思を持たせるかのような哲学的な解釈で紹介されることがあります。
さらに歴史的には、停留作用の原理が神学と融合することで、”自然は無駄を嫌う”という形での神の完全性や知恵の証明としても受け止められました。この、物理法則に哲学的あるいは宗教的な意味を持たせるという姿勢は、やがて激しい論争の的になっていきます。
これに対して、物理学が決定的な否定をしたのは、量子力学、特にファインマンが構築した「経路積分」という枠組みにおいてです。簡単に言うと、粒子は始点から終点へ向かう際、最も効率的な1つの経路を選んでいるわけではありません。物理的に可能なありとあらゆる経路を同時にすべて通っていますが、位相の重ね合わせによって強め合ったり、逆に互いに打ち消し合って消えてしまったりして、人間の目に見えるマクロなスケールではまるで「最も効率的な経路が選ばれた」かのように見えるだけだというわけです。
さて原理2.3ですが、一般的には次のような形に変えて用いられることが多いです。
定理2.6(オイラー=ラグランジュ方程式)
系の一般化座標を\(\boldsymbol{q}=(q_1,q_2,…,q_N)\)、系に対応するラグランジアンを\(L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t)\)としたとき、\(i=1,2,…,N\)に対して以下が成り立つ。
$$
\frac{\partial L}{\partial q_i} – \frac{d}{dt} \frac{\partial L}{\partial \dot{q}_i} =0
$$
定理2.6の証明
現実の経路を\(\boldsymbol{q}(t)\)として、ここから任意に微小ずれた仮想の経路を\(\boldsymbol{q}(t)+\delta \boldsymbol{q}(t)\)と表す。なお、経路がずれると当然それに伴って速度も\(\dot{\boldsymbol{q}}(t)\)から \(\dot{\boldsymbol{q}}(t)+\delta\dot{\boldsymbol{q}}(t)\)へと変化する。
ここで、極限の定義を考えると、
$$
\delta \left( \frac{d}{dt} \boldsymbol{q}(t) \right) = \delta\dot{\boldsymbol{q}}(t) = \lim_{t_2 \to t_1} \left( \frac{\left( \boldsymbol{q}(t_2)+\delta \boldsymbol{q}(t_2) \right) – \left( \boldsymbol{q}(t_1)+\delta \boldsymbol{q}(t_1) \right)}{t_2-t_1} – \frac{\boldsymbol{q}(t_2) – \boldsymbol{q}(t_1)}{t_2-t_1} \right) = \frac{d}{dt}\delta \boldsymbol{q}(t)
$$より、変分の時間微分と時間微分の変分が等しいことがわかる。
さて、経路が\(\delta \boldsymbol{q}(t)\)だけずれたときの作用\(S\)の変分
$$
\delta S=\int_{t_i}^{t_f} L(\boldsymbol{q}+\delta \boldsymbol{q}, \dot{\boldsymbol{q}}+\delta \dot{\boldsymbol{q}}, t) dt-\int_{t_i}^{t_f}L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t) dt
$$を計算する。偏微分を用いて微小項の1次まで展開すると、変分の時間微分と時間微分の変分が等しいことを用いて、
$$
\delta S=\int_{t_i}^{t_f} \sum_{i=1}^N \left(\frac{\partial L}{\partial q_i} \delta q_i + \frac{\partial L}{\partial \dot{q}_i} \delta\dot{q}_i \right) dt = \int_{t_i}^{t_f} \sum_{i=1}^N \left\{ \frac{\partial L}{\partial q_i} \delta q_i + \frac{\partial L}{\partial \dot{q}_i} \left( \frac{d}{dt} \delta q_i \right) \right\}
$$第2項を部分積分を用いて展開すると、主張2.3の前提として始点と終点における変分\(\delta \boldsymbol{q}(t_i)\), \(\delta \boldsymbol{q}(t_f)\)はゼロになるから、
$$
\int_{t_i}^{t_f} \sum_{i=1}^N \left\{ \frac{\partial L}{\partial \dot{q}_i} \left(\frac{d}{dt} \delta q_i \right) \right\} dt = \sum_{i=1}^N \left\{ \left[ \frac{\partial L}{\partial \dot{q}_i}\delta q_i\right]_{t_i}^{t_f} – \int_{t_i}^{t_f} \left( \frac{d}{dt}\frac{\partial L}{\partial\dot{q}_i} \right) \delta q_i \right\} dt = \int_{t_i}^{t_f} \sum_{i=1}^N \left\{ \left( \frac{d}{dt} \frac{\partial L}{\partial \dot{q}_i} \right) \delta q_i \right\} dt
$$とかける。主張2.3より\(\delta S=0\)であるから、
$$
\int_{t_i}^{t_f} \sum_{i=1}^N \left\{ \left( \frac{\partial L}{\partial q_i} – \frac{d}{dt} \frac{\partial L}{\partial \dot{q}_i} \right) \delta q_i \right\} dt =0
$$ここで数学的に、変分法の基本補題より、それぞれ始点と終点以外ではどんな形でも自由に選べる任意のズレである\(\delta q_i(t)\)に対して、どんな\(\delta q_i(t)\)を掛け算して積分しても結果が常にゼロになることと、カッコの中身の関数自体が常にゼロであることは同値だから、\(i=1,2,…,N\)に対して以下が成り立つ。
$$
\frac{\partial L}{\partial q_i} – \frac{d}{dt} \frac{\partial L}{\partial \dot{q}_i} =0
$$□
さて、ここまでがラグランジュ力学の出発点です。ここからは、原理から成り立つ定理をどんどん見ていきましょう。
5 ゲージ不変性の定理
さてここまでで解析力学には、ラグランジアンの具体的な表式に依らず、オイラー=ラグランジュ方程式から成り立つ「定理」さえ準備しておけば、あとは先ほどの例のように、物理が要請する内容にあうラグランジアンをつくるだけで、その物理において成り立つことが一気に出てくるという良さがありそうだ、ということがイメージしていただけるでしょうか。
オイラー=ラグランジュ方程式から成り立つ「定理」の一つとして、ゲージ不変性の定理があるので紹介します。ラグランジアンは関数として一意に定まらず、関数の全微分だけの不定性が残るという定理です。
定理2.7(ゲージ不変性の定理)
ある系におけるラグランジアンを\(L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t)\)とする。このとき、任意の関数\(G(\boldsymbol{q},t)\)に対して、\(\tilde{L}=L+\frac{dG}{dt}\)とすると、各\(i\)に対して、以下の2方程式は等価である。
$$
\frac{\partial L}{\partial q_i} – \frac{d}{dt} \frac{\partial L}{\partial \dot{q}_i} =0 \qquad \frac{\partial \tilde{L}}{\partial q_i} – \frac{d}{dt} \frac{\partial \tilde{L}}{\partial \dot{q}_i} =0
$$
定理2.7の証明
ラグランジアンを\(\tilde{L}\)としたときの左辺を変形する。第1項および第2項は、
$$
\text{第1項}=\frac{\partial}{\partial q_i} \left( L+\frac{dG}{dt} \right) = \frac{\partial L}{\partial q_i}+ \frac{\partial}{\partial q_i} \left\{ \sum_{j=1}^N \left( \frac{\partial G}{\partial q_j} \frac{\partial q_j}{\partial t} \right) + \frac{\partial G}{\partial t} \frac{dt}{dt} \right\} = \frac{\partial L}{\partial q_i} + \sum_{i=1}^N \frac{\partial^2 G}{\partial q_i \partial q_j} \frac{\partial q_j}{\partial t} + \frac{\partial^2 G}{\partial q_i \partial t}
$$$$
\text{第2項}= \frac{d}{dt} \left\{ \frac{\partial}{\partial \dot{q}_i} \left( L+\frac{dG}{dt} \right) \right\} = \frac{d}{dt} \frac{\partial L}{\partial \dot{q}_i} + \frac{d}{dt} \frac{\partial \dot{G}}{\partial \dot{q}_i} = \frac{d}{dt} \frac{\partial L}{\partial \dot{q}_i} + \frac{d}{dt} \frac{\partial G}{\partial q_i} = \frac{d}{dt} \frac{\partial L}{\partial \dot{q}_i} + \sum_{i=1}^N \frac{\partial^2 G}{\partial q_i \partial q_j} \frac{\partial q_j}{\partial t} + \frac{\partial^2 G}{\partial q_i \partial t}
$$のようになる。ただし、2式目の3つめの等号は、以下の関係を利用している。
$$
\frac{\partial \dot{G}}{\partial \dot{q}_i} = \frac{\partial}{\partial \dot{q}_i} \left( \sum_{j=1}^N \frac{\partial G}{\partial q_j} \dot{q}_j + \frac{\partial G}{\partial t} \right) = \frac{\partial G}{\partial q_i}
$$したがって、元の式の左辺に代入すると、
$$
\text{左辺}= \left( \frac{\partial L}{\partial q_i} + \sum_{i=1}^N \frac{\partial^2 G}{\partial q_i \partial q_j} \frac{\partial q_j}{\partial t} + \frac{\partial^2 G}{\partial q_i \partial t} \right) – \left( \frac{d}{dt} \frac{\partial L}{\partial \dot{q}_i} + \sum_{i=1}^N \frac{\partial^2 G}{\partial q_i \partial q_j} \frac{\partial q_j}{\partial t} + \frac{\partial^2 G}{\partial q_i \partial t} \right) = \frac{\partial L}{\partial q_i} – \frac{d}{dt} \frac{\partial L}{\partial \dot{q}_i}
$$となるから、ラグランジアンを\(L\)としたときと\(\tilde{L}\)としたときで、オイラーラグランジュ方程式は等価であることが示された。□
6 ネーターの定理
ネーターの定理もオイラー=ラグランジュ方程式から成り立つ定理であって、保存則を統一的に見つけられる非常に重要な定理になります。
ある力学系について、何らかの変換をしたときにその記述が変化を受けないとき、これを「対称性がある」と表現します。例えば、その系を平行移動したときに変化がないならば「空間並進に対して対称性がある」といったり、その系が時間の並進に対して変化がないならば「時間並進に対して対称性がある」といったりする、ということです。
この対称性に対応して、保存則が出てくると主張するのが、ネーターの定理です。
定理2.8(ネーターの定理)
一般化座標における無限小変換\(\boldsymbol{q} \to \boldsymbol{q}+ \delta \boldsymbol{q}\)を考えたときに、ラグランジアンが\(L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t) \to L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t)+ \frac{d}{dt} J\)と変化する、つまりラグランジアンの変分\(\delta L\)がある関数の時間による全微分でかけるならば、以下の値は時間変化に対して保存する。
$$
\left( \sum_{i=1}^N \frac{\partial L}{\partial \dot{q}_i} \delta q_i \right) – J
$$
定理2.8の証明
まず、一般化座標が\(q_i \to q_i + \delta q_i\)と変化したときのラグランジアン \(L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t)\)の変分\(\delta L\)を、テイラー展開の1次の項まで書き下す。ここで、極限の定義より、
$$
\delta \left( \frac{d}{dt} \boldsymbol{q}(t) \right) = \delta\dot{\boldsymbol{q}}(t) = \lim_{t_2 \to t_1} \left( \frac{\left( \boldsymbol{q}(t_2)+\delta \boldsymbol{q}(t_2) \right) – \left( \boldsymbol{q}(t_1)+\delta \boldsymbol{q}(t_1) \right)}{t_2-t_1} – \frac{\boldsymbol{q}(t_2) – \boldsymbol{q}(t_1)}{t_2-t_1} \right) = \frac{d}{dt}\delta \boldsymbol{q}(t)
$$となるから、変分の時間微分と時間微分の変分が等しいことに注意すると、
$$
\delta L = \sum_{i=1}^N \left( \frac{\partial L}{\partial q_i} \delta q_i + \frac{\partial L}{\partial \dot{q}_i} \delta \dot{q}_i \right) = \sum_{i=1}^N \left[ \frac{d}{dt} \left( \frac{\partial L}{\partial \dot{q}_i} \right) \delta q_i + \frac{\partial L}{\partial \dot{q}_i} \frac{d}{dt}(\delta q_i) \right] = \sum_{i=1}^N \frac{d}{dt} \left( \frac{\partial L}{\partial \dot{q}_i} \delta q_i \right) = \frac{d}{dt} \left( \sum_{i=1}^N \frac{\partial L}{\partial \dot{q}_i} \delta q_i \right)
$$となる。ただし、2つ目の等号は系が現実の物理法則に従って運動している、つまり、オイラー=ラグランジュ方程式を満足すること、3つ目の等号は大カッコ\([\quad]\)の中身に積の微分公式を用いた。
ここで、いま定理2.6の仮定より、ラグランジアンの変分\(\delta L\)がある関数\(J\)の時間による全微分でかけることを用いると、
$$
\frac{d}{dt} \left( \sum_{i=1}^N \frac{\partial L}{\partial \dot{q}_i} \delta q_i \right) = \frac{d}{dt} J
$$となるので、移項して、
$$
\frac{d}{dt} \left( \sum_{i=1}^N \frac{\partial L}{\partial \dot{q}_i} \delta q_i – J \right) = 0
$$とかくことができる。ある量の時間微分がゼロになるということは、その量が時間的に変化しない定数であることを意味するため、示された。□
さて、ここから面白いほど簡単に保存則を出すことができます。例としていくつか考えてみましょう。
例2.9
特定の方向(例えば一般化座標の\(k\)番目\(q_k\))への無限小変換に対する対称性がある力学系を考える。まず、一般化座標の\(k\)番目\(q_k\)方向への無限小変換は、\(\boldsymbol{q} \to \boldsymbol{q} + \epsilon \boldsymbol{e}_k \)と表すことができる。仮定より、この変換に対してラグランジアン\(L\)が変化しない、つまりラグランジアンの変分\(\delta L\)がゼロであるので、定理2.8の結果より、
$$
\sum_{i=1}^N \frac{\partial L}{\partial \dot{q}_i} \delta q_i – J = \epsilon \frac{\partial L}{\partial \dot{q}_k}
$$は保存する。\(\epsilon\)は任意の定数であるから、これを\(\epsilon\)で割った\(\frac{\partial L}{\partial \dot{q}_k}\)も時間変化に対して保存する。
例2.10
時間並進に対する対称性がある力学系を考える。まず、時間を微小な定数\(\epsilon\)だけ進める無限小変換は、\(\boldsymbol{q} \to \boldsymbol{q} + \epsilon \dot{\boldsymbol{q}} \)と表すことができる。仮定より、この変換に対してラグランジアン\(L\)が時間並進対称性をもつ、つまりラグランジアンが時間\(t\)を直接の変数としては含まないといえるので、\(\frac{\partial L}{\partial t}=0\)である。これより、ラグランジアン\(L(\boldsymbol{q},\dot{\boldsymbol{q}},t)\)を時間\(t\)で全微分すると、合成関数の微分法を用いて、
$$
\frac{dL}{dt} = \sum_{i=1}^N \left( \frac{\partial L}{\partial q_i} \dot{q}_i + \frac{\partial L}{\partial \dot{q}_i} \ddot{q}_i \right) + \frac{\partial L}{\partial t} = \left[ \sum_{i=1}^N \left( \frac{\partial L}{\partial q_i} \dot{q}_i + \frac{\partial L}{\partial \dot{q}_i} \ddot{q}_i \right) \right]
$$とかける。一方、ラグランジアンの変分\(\delta L\)は
$$
\delta L = \sum_{i=1}^N \left( \frac{\partial L}{\partial q_i} \delta q_i + \frac{\partial L}{\partial \dot{q}_i} \delta \dot{q}_i \right) = \sum_{i=1}^N \left( \frac{\partial L}{\partial q_i} (\dot{q}_i \epsilon) + \frac{\partial L}{\partial \dot{q}_i} (\ddot{q}_i \epsilon) \right) = \left[ \sum_{i=1}^N \left( \frac{\partial L}{\partial q_i} \dot{q}_i + \frac{\partial L}{\partial \dot{q}_i} \ddot{q}_i \right) \right] \epsilon
$$とかける。2式の大カッコ\([\quad]\)の中身は同じであるので、代入して整理すると、
$$
\delta L = \frac{dL}{dt} \epsilon = \frac{d}{dt} (\epsilon L)
$$というように、ラグランジアンの変分\(\delta L\)が関数の時間による全微分でかけるから、定理2.8の結果より、
$$
\sum_{i=1}^N \frac{\partial L}{\partial \dot{q}_i} \delta q_i – J = \epsilon \left\{ \left( \sum_{i=1}^N \frac{\partial L}{\partial \dot{q}_i} \dot{q}_i \right) – L \right\}
$$は保存する。\(\epsilon\)は任意の定数であるから、これを\(\epsilon\)で割った\( \left( \sum_{i=1}^N \frac{\partial L}{\partial \dot{q}_i} \dot{q}_i \right) – L \)も時間変化に対して保存する。
例2.11
\(i\)番目の粒子の3次元直交座標ベクトルを\(\boldsymbol{r}_i=(x_i,y_i,z_i)\)として、\({c_x}^2+{c_y}^2+{c_z}^2=1\)を満たす\(c_x,c_y,c_z\)に対して、単位ベクトル\(\boldsymbol{e}_j=c_x\boldsymbol{e}_x+c_y\boldsymbol{e}_y+c_z\boldsymbol{e}_z\)を定義する。このとき、\(\boldsymbol{e}_j\)方向を軸とする空間回転対称性がある力学系を考える。まず、\(\boldsymbol{e}_j\)方向を軸として、微小な角度だけ回転させる無限小変換は、
$$
\delta \boldsymbol{r}_i = (\delta \theta \boldsymbol{e}_j) \times \boldsymbol{r}_i = \delta \theta (\boldsymbol{e}_j \times \boldsymbol{r}_i)
$$と表すことができる。仮定より、この変換に対してラグランジアン\(L\)が変化しない、つまりラグランジアンの変分\(\delta L\)がゼロであるので、定理2.8の結果より、
\begin{align*}
&\sum_{i=1}^N \frac{\partial L}{\partial \dot{r}_i} \delta r_i – J = \sum_{i=1}^N \left( \sum_{j=1}^3 p_{ij} \delta r_{ij} \right) = \sum_{i=1}^N \left( \nabla_{\dot{\boldsymbol{r}}_i} L \right) \cdot \delta \boldsymbol{r}_i \\
&= \sum_{i=1}^N \left( \nabla_{\dot{\boldsymbol{r}}_i} L \right) \cdot \delta \theta (\boldsymbol{e}_j \times \boldsymbol{r}_i) = \delta \theta \boldsymbol{e}_j \cdot \left\{ \sum_{i=1}^N \boldsymbol{r}_i \times \left( \nabla_{\dot{\boldsymbol{r}}_i} L \right) \right\}
\end{align*}は保存する。\(\delta \theta \)は任意の定数であるから、\(\boldsymbol{e}_j \cdot \left\{ \sum_{i=1}^N \boldsymbol{r}_i \times \left( \nabla_{\dot{\boldsymbol{r}}_i} L \right) \right\} \)も時間変化に対して保存する。
7 拘束系への拡張
さて、この節では”拘束のある”力学系におけるラグランジュ力学を考えましょう。
\(N\)次元の力学系について\(x_1,x_2,…,x_N\)がそれぞれ独立に、かつ無制限に動くことができるときは、系の粒子の位置を指定するために\(N\)個の変数を必要とします。その一方で、変数の間に関係式として\(G(x_1,x_2,…,x_N,t)=0\)のようなものが存在するときは、系の粒子の位置を指定するために必要な変数が減ることになりますよね。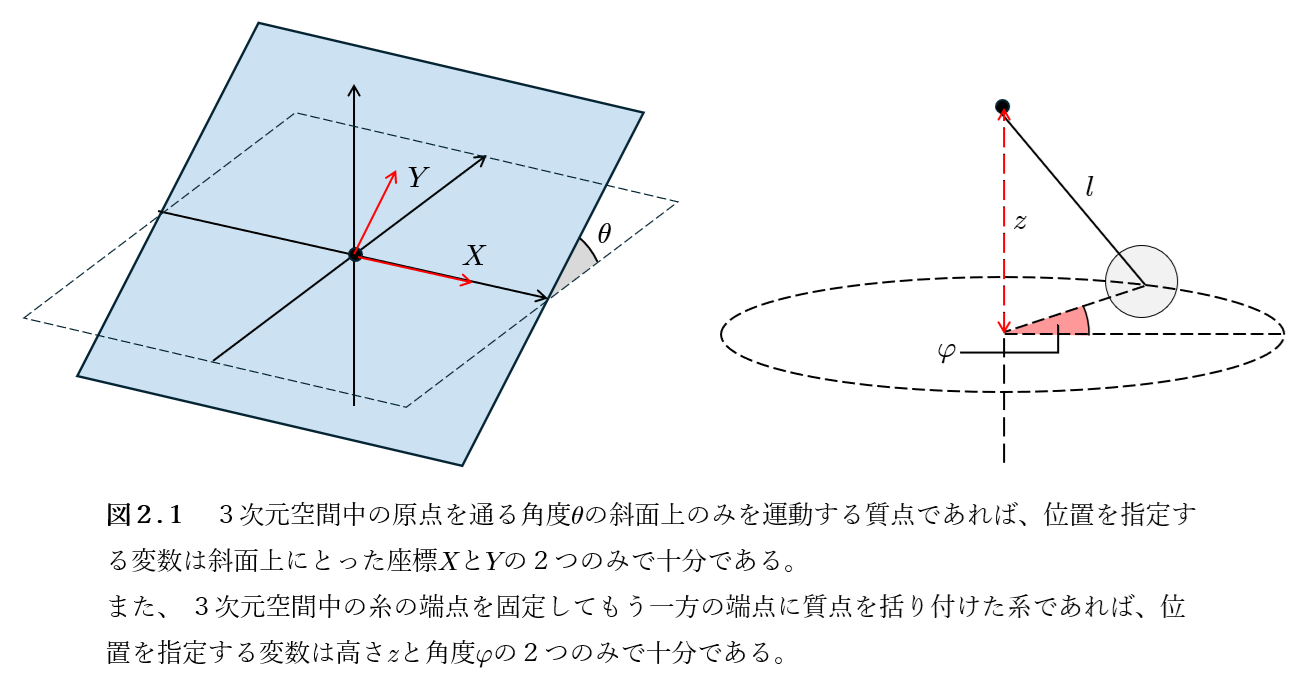 例えば、図2.1の台の上を転がる運動であれば、質点の位置を表す直交座標\(x,y,z\)が\(z=x \tan \theta\)という関係式を満たしており、このために質点の位置は2変数で与えられることになります。
例えば、図2.1の台の上を転がる運動であれば、質点の位置を表す直交座標\(x,y,z\)が\(z=x \tan \theta\)という関係式を満たしており、このために質点の位置は2変数で与えられることになります。
図2.1の糸につながった運動でも、質点の位置を表す円筒座標\(\rho,\phi,z\)が\(\rho=l\)という関係式を満たしており、このために質点の位置は2変数でかけば済むことになります。
こういうように、系の粒子の位置を表す変数が等式\(G(x_1,x_2,…,x_N,t)=0\)によって制限されているときに”拘束がある”と表現します。正確には、現実の力学系においては不等式による拘束や、等式が変数の時間微分を含んでかかれる拘束などもありますが、簡単のため本稿では、位置を表す変数間の等式による拘束(ホロノミックな拘束)のみを扱うことにします。
■拘束条件の扱い方①―未定乗数をとる
定理2.12
系の一般化座標を\(\boldsymbol{q}=(q_1,q_2,…,q_N)\)としたとき、物理系に対応してラグランジアン\(L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t)\)が定まるならば、拘束条件として\(M\)本の式\(G_j(\boldsymbol{q}, t)=0 \quad (j=1,2,…,M)\)を要求するとき、\(i=1,2,…,N\)に対して
$$
\frac{\partial L}{\partial q_i} – \frac{d}{dt} \frac{\partial L}{\partial \dot{q}_i} =\sum_{j=1}^M \lambda_j \frac{\partial G_j}{\partial q_i}
$$を満足するような時間\(t\)の関数の組\(\{\lambda_j(t) \}_{j=1}^M \)が存在する。
定理2.12の証明
停留作用の原理より、ラグランジアン\(L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t)\)は現実に力学系が通過する軌道\(\boldsymbol{q}(t)\)に対して、\(S=\int_{t_i}^{t_f} L dt\)の変分\(\delta S\)をゼロにする量として定義されていた。これより、ラグランジアン\(L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t)\)の変分を計算し、この証明のときと同様に\(\delta \dot{q}_i\)の項を部分積分すると、次の式が得られる。
$$
\int_{t_i}^{t_f} \sum_{i=1}^N \left\{ \left( \frac{\partial L}{\partial q_i} – \frac{d}{dt} \frac{\partial L}{\partial \dot{q}_i} \right) \delta q_i \right\} dt =0
$$もし\(N\)個の変数\(q_i\)がすべて互いに独立に動けるのであれば、変分法の基本補題よりカッコの中身がそれぞれ0になり通常のオイラー=ラグランジュ方程式が得られるが、ここでは\(M\)個の拘束条件により各\(\delta q_i\)は独立して動くことができないため、カッコの中身がそれぞれ0とはいえない。ただ、積分の中身について、
$$
\sum_{i=1}^N \left\{ \left( \frac{\partial L}{\partial q_i} – \frac{d}{dt} \frac{\partial L}{\partial \dot{q}_i} \right) \delta q_i \right\} =0 \qquad \text{(a)}
$$であることは成り立つ。ここで、\(\boldsymbol{x}\)として、
$$
\boldsymbol{x}= {}^t \left( \frac{\partial L}{\partial q_1} – \frac{d}{dt} \frac{\partial L}{\partial \dot{q}_1} , \frac{\partial L}{\partial q_2} – \frac{d}{dt} \frac{\partial L}{\partial \dot{q}_2} , … , \frac{\partial L}{\partial q_N} – \frac{d}{dt} \frac{\partial L}{\partial \dot{q}_N} \right)
$$を定義すると、(a)式は\(\boldsymbol{x} \cdot \delta \boldsymbol{q} = 0\)と書き換えることができる。
ここで、系の\(M\)個の拘束条件\(G_j(\boldsymbol{q}, t)=0 \quad (j=1,2,…,M)\)について、軌道が\(\delta q_i\)だけズレた仮想的な経路でも、この拘束条件は満たされていなければならないため、時間を固定して\(G_j\)の変分をとると、
$$
\delta G_j = G_j(\boldsymbol{q} + \delta \boldsymbol{q} , t) – G_j(\boldsymbol{q}, t) = \sum_{i=1}^N \frac{\partial G_j}{\partial q_i} \delta q_i = 0 \qquad (j=1,2,…,M)
$$とならねばならない。これは\(\nabla_{\boldsymbol{q}} G_j \cdot \delta \boldsymbol{q} = 0\)と書き換えることができる。
以上より、\(\nabla_{\boldsymbol{q}} G_j \cdot \delta \boldsymbol{q} = 0\)のもとで自由に動く微小の経路変化\(\delta \boldsymbol{r}\)が、\(\boldsymbol{x} \cdot \delta \boldsymbol{q} = 0\)を満たすような\(\boldsymbol{x}\)の条件さえ求めればよいが、この条件は\(\boldsymbol{x}\)が\(\{ \nabla_{\boldsymbol{q}} G_j \}_{i=1}^N\)によって張られる部分空間の元であること、すなわち、
$$
\boldsymbol{x} = \sum_{j=1}^M \lambda_j \nabla_{\boldsymbol{q}} G_j
$$なる時間\(t\)の関数の組\(\{\lambda_j(t) \}_{j=1}^M \)が存在することである。よって、この各成分をみると示されている。□
ここで、定理2.12の式を変形すると、\(G_j(\boldsymbol{q}, t)\)は\(\dot{\boldsymbol{q}}\)を引数に含まないため、
$$
\frac{\partial}{\partial q_i} \left( L-\sum_{j=1}^M \lambda_j G_j \right) – \frac{d}{dt} \frac{\partial}{\partial \dot{q}_i} \left( L-\sum_{j=1}^M \lambda_j G_j \right) = 0
$$と書き換えることができることが分かりますね、つまり、拘束条件があるときは、ラグランジアン\(L\)を\( L-\sum_{j=1}^M \lambda_j G_j \)に置き換えていると見ることもできる、ということです。いずれにしても、
$$
\frac{\partial L}{\partial q_i} – \frac{d}{dt} \frac{\partial L}{\partial \dot{q}_i} =\sum_{j=1}^M \lambda_j \frac{\partial G_j}{\partial q_i} \qquad (i=1,2,…,N)
$$$$
G_j(\boldsymbol{q}, t)=0 \qquad (j=1,2,…,M)
$$という\(N+M\)個の式を立てれば、理論的には\(\{q_i(t)\}_{i=1}^N \), \(\{\lambda_j(t) \}_{j=1}^M \)という\(N+M\)個の変数を求めることができるため、定理2.12でもって、ホロノミックな拘束条件が与えられたときの運動は解くことができるといえます。
■拘束条件の扱い方②―変数を消去する
というように、ここまでホロノミックな拘束条件が与えられたときの運動を解く方法を考えてきましたが、こうは思わなかったでしょうか。例えば、図2.1の糸につながった運動であれば、\(-\lambda (\rho-l)\)の項を追加せずとも、そもそもラグランジアン自体に\(\rho=l\)を代入してしまえばよいのではないか、、と。
拘束条件としての\(M\)本の式\(G_j(\boldsymbol{q}, t)=0 \quad (j=1,2,…,M)\)を使うと、\(N\)個の変数は、変数消去によって\(N-M\)個に減らすことができるでしょう。こうしてできた\(N-M\)本のオイラー=ラグランジュ方程式から解いた運動が、先ほどのように未定乗数\(\{\lambda_j(t) \}_{j=1}^M \)をとって解いたときの運動と同じものであることを確認しておきましょう。
定理2.13
拘束条件として\(M\)本の式\(G_j(\boldsymbol{q}, t)=0 \quad (j=1,2,…,M)\)を要求するとき、系の一般化座標のうち拘束条件を解いて残る変数を\(\boldsymbol{q}=(q_1,q_2,…,q_n)\)、拘束条件を解いて消える変数を\(\boldsymbol{Q}=(Q_1,Q_2,…,Q_M)\)とする(ただし\(N=n+M\))。
ここで、物理系に対応してラグランジアン\(L(\boldsymbol{q}, \dot{\boldsymbol{q}}, \boldsymbol{Q}, \dot{\boldsymbol{Q}}, t)\)が定まるならば、これに\(\boldsymbol{Q}=\boldsymbol{Q}(\boldsymbol{q},t)\), \(\dot{\boldsymbol{Q}}=\dot{\boldsymbol{Q}}(\boldsymbol{q},\dot{\boldsymbol{q}},t)\)を代入して変数を消去した\(\tilde{L}(\boldsymbol{q}, \dot{\boldsymbol{q}},t) = L(\boldsymbol{q}, \dot{\boldsymbol{q}}, \boldsymbol{Q}(\boldsymbol{q},t), \dot{\boldsymbol{Q}}(\boldsymbol{q},\dot{\boldsymbol{q}},t), t)\)に対して、
$$
\frac{\partial \tilde{L}}{\partial q_i} – \frac{d}{dt} \frac{\partial \tilde{L}}{\partial \dot{q}_i} =0 \qquad (i=1,2,…n)
$$を解いて求めた運動は、定理2.12により求めた運動と同じものである。
定理2.13の証明
先に準備として(a),(b),(c),(d),(e)式を与える。
まず変数消去で消える座標\(Q_k\)は座標\(\boldsymbol{q}\)と時間\(t\)の関数\(Q_k(\boldsymbol{q}, t)\)として表されるので、これを時間で微分すると、速度\(\dot{Q}_k\)は合成関数の微分より、
$$
\dot{Q}_k = \frac{d Q_k}{dt} = \sum_{j=1}^N \frac{\partial Q_k}{\partial q_j} \frac{d q_j}{dt} + \frac{\partial Q_k}{\partial t} \frac{dt}{dt} = \sum_{j=1}^N \frac{\partial Q_k}{\partial q_j}\dot{q}_j + \frac{\partial Q_k}{\partial t}
$$とかける。この\(\dot{Q}_k\)を\(\dot{q}_i\)以外を定数とみなして偏微分すると、\(Q_k\)は\(\boldsymbol{q}\)と時間\(t\)の関数であるため、\(\frac{\partial Q_k}{\partial q_j}\)や\(\frac{\partial Q_k}{\partial t}\)は\(\dot{\boldsymbol{q}}\)を引数に含まないから、合成関数の微分より、
$$
\frac{\partial \dot{Q}_k}{\partial \dot{q}_j} = \frac{\partial}{\partial \dot{q}_j} \left( \sum_{j=1}^N \frac{\partial Q_k}{\partial q_j}\dot{q}_j + \frac{\partial Q_k}{\partial t} \right) = \frac{\partial Q_k}{\partial q_j} \qquad \text{(a)}
$$が成り立つ。続いて、拘束条件\(G_j(\boldsymbol{q}, \boldsymbol{Q}, t) = 0\)を解いて得られた\(\boldsymbol{Q} = \boldsymbol{Q}(\boldsymbol{q}, t)\)を元の式に代入した恒等式\(\tilde{G}_j(\boldsymbol{q}, t) = G_j(\boldsymbol{q}, \boldsymbol{Q}(\boldsymbol{q}, t), t) = 0\)について、この両辺を独立変数\(q_i\)で偏微分すると、合成関数の微分を用いて、
$$
\frac{\partial \tilde{G}_j}{\partial q_i} = \frac{\partial G_j}{\partial q_i} + \sum_{k=1}^M \frac{\partial G_j}{\partial Q_k} \frac{\partial Q_k}{\partial q_i} = 0 \qquad \text{(b)}
$$となる。次に、変数を消去したラグランジアン\(\tilde{L}(\boldsymbol{q}, \dot{\boldsymbol{q}}, t) = L(\boldsymbol{q}, \dot{\boldsymbol{q}}, \boldsymbol{Q}(\boldsymbol{q},t), \dot{\boldsymbol{Q}}(\boldsymbol{q},\dot{\boldsymbol{q}},t), t)\)についても\(q_i\)と \(\dot{q}_i\)でそれぞれ偏微分すると、合成関数の微分を用いて、
$$
\frac{\partial \tilde{L}}{\partial q_i} = \frac{\partial L}{\partial q_i} + \sum_{k=1}^M \left( \frac{\partial L}{\partial Q_k} \frac{\partial Q_k}{\partial q_i} + \frac{\partial L}{\partial \dot{Q}_k} \frac{\partial \dot{Q}_k}{\partial q_i} \right) \qquad \text{(c)}
$$$$
\frac{\partial \tilde{L}}{\partial \dot{q}_i} = \frac{\partial L}{\partial \dot{q}_i} + \sum_{k=1}^M \frac{\partial L}{\partial \dot{Q}_k} \frac{\partial \dot{Q}_k}{\partial \dot{q}_i} = \frac{\partial L}{\partial \dot{q}_i} + \sum_{k=1}^M \frac{\partial L}{\partial \dot{Q}_k} \frac{\partial Q_k}{\partial q_i} \qquad \text{(d)}
$$となる。ただし、(d)式の1つ目の等号は\(\boldsymbol{Q}(\boldsymbol{q},t)\)は速度\(\dot{\boldsymbol{q}}\)には依存しないため、\(\frac{\partial Q_k}{\partial \dot{q}_i}=0\)であること、2つ目の等号は(a)式を用いている。(d)式をさらに時間\(t\)で全微分すると、積の微分公式を用いて、
$$
\frac{d}{dt}\left(\frac{\partial \tilde{L}}{\partial \dot{q}_i}\right) = \frac{d}{dt}\left(\frac{\partial L}{\partial \dot{q}_i}\right) + \sum_{k=1}^M \left[ \frac{d}{dt}\left(\frac{\partial L}{\partial \dot{Q}_k}\right) \frac{\partial Q_k}{\partial q_i} + \frac{\partial L}{\partial \dot{Q}_k} \frac{d}{dt}\left(\frac{\partial Q_k}{\partial q_i}\right) \right] \qquad \text{(e)}
$$となっている。さて、式(a),(b),(c),(d),(e)を与えたので証明に入る。定理2.12の式から定理2.13の式が矛盾なく出てくることを示す。
定理2.12は、すべての変数(\(q_i\)と\(Q_k\))に対して
$$
\frac{\partial L}{\partial q_i} – \frac{d}{dt}\frac{\partial L}{\partial \dot{q}_i} = \sum_{j=1}^M \lambda_j \frac{\partial G_j}{\partial q_i} \qquad \text{(f)}
$$$$
\frac{\partial L}{\partial Q_k} – \frac{d}{dt}\frac{\partial L}{\partial \dot{Q}_k} = \sum_{j=1}^M \lambda_j \frac{\partial G_j}{\partial Q_k} \qquad \text{(g)}
$$が成り立つことを主張している。ここから定理2.13の式が矛盾なく出てくることを示すために、(c)式と(e)式を引き算して\(\tilde{L}\)のオイラー=ラグランジュ方程式の左辺を計算すると、
$$
\frac{\partial \tilde{L}}{\partial q_i} – \frac{d}{dt}\left(\frac{\partial \tilde{L}}{\partial \dot{q}_i}\right) = \left( \frac{\partial L}{\partial q_i} – \frac{d}{dt}\frac{\partial L}{\partial \dot{q}_i} \right) + \sum_{k=1}^M \left( \frac{\partial L}{\partial Q_k} – \frac{d}{dt}\frac{\partial L}{\partial \dot{Q}_k} \right) \frac{\partial Q_k}{\partial q_i}
$$となる。右辺に(f)式と(g)式を代入することで、
$$
\frac{\partial \tilde{L}}{\partial q_i} – \frac{d}{dt}\left(\frac{\partial \tilde{L}}{\partial \dot{q}_i}\right) = \sum_{j=1}^M \lambda_j \frac{\partial G_j}{\partial q_i} + \sum_{k=1}^M \left( \sum_{j=1}^M \lambda_j \frac{\partial G_j}{\partial Q_k} \right) \frac{\partial Q_k}{\partial q_i} = \sum_{j=1}^M \lambda_j \left[ \frac{\partial G_j}{\partial q_i} + \sum_{k=1}^M \frac{\partial G_j}{\partial Q_k} \frac{\partial Q_k}{\partial q_i} \right] = 0
$$となっている。ただし、3つ目の等号は(b)式を用いた。これは定理2.13の\(\tilde{L}\)のオイラー=ラグランジュ方程式そのものであるから、示された。□
“拘束のある”力学系へのラグランジュ力学の適用として、これら2つの方法を確認したのはどちらも得手と不得手があるからです。簡単な拘束条件ならば変数を消去した方が早いですが、変数消去をしようとすると平方根が出てくる場合などはあえてそのまま残して未定乗数をとった方がいいときもあるので、どちらも確認しておきましょう。
第3章―ハミルトン力学
1 ハミルトン力学の基本原理
解析力学には大きく分けて「ラグランジュ力学」と「ハミルトン力学」という2つの記述方法があるといいましたので、今度はもう一方のハミルトン力学について見ていきましょう。ここでも結論から示すと、ハミルトン力学は次のことを原理としています。
原理3.1(力学系の状態の記述)
任意の力学系の状態は、マクロに見て\(n\)個の独立変数\(\boldsymbol{q} = (q_1, q_2, \dots, q_n)\)と、それに共役な\(n\)個の独立変数\(\boldsymbol{p} = (p_1, \dots, p_n)\)、および時間\(t\)によって完全に一意に指定される。
なお、変数の組\(\boldsymbol{q}\)を一般化座標、\(\boldsymbol{p}\)を一般化運動量とよぶこととする。
原理3.2(ハミルトニアンの存在)
任意の力学系には、その系の自由度や対称性、相互作用などといった性質を完全に決定づける状態量\(H\)が存在し、\(H\)は系の一般化座標\(\boldsymbol{q}=(q_1,q_2,…,q_N)\)、一般化運動量\(\dot{\boldsymbol{p}} = (\dot{p}_1, \dot{p}_2, \dots, \dot{p}_n)\)、および時間\(t\)の関数として、\(H = H(\boldsymbol{q}, \dot{\boldsymbol{p}}, t)\)のように表される。
なお、この関数\(H(\boldsymbol{q}, \dot{\boldsymbol{p}}, t)\)をハミルトニアンとよぶこととする。
原理3.3(ハミルトンの正準方程式)
系の時間発展は、ハミルトニアン\(H\)を用いて以下の対称的な1階微分方程式
$$
\frac{\partial H}{\partial q_i} = – \dot{p}_i \qquad
\frac{\partial H}{\partial p_i} = \dot{q}_i \qquad (i=1,2,…,N)
$$によって完全に記述される。
さてハミルトン力学の原理はこの3つになりますが、実はラグランジュ力学とハミルトン力学は、物理を記述する枠組みとして原則として互いに等価で、同じことを言い方を変えて説明しているだけです。相性がいい分野や問題がそれぞれ違うためにどちらも学ぶ対象として、どちらも生き残っているわけですね。
ということはこれらの原理は、ラグランジュ力学の3つの原理から導き出せるわけですね。1つずつやってみましょう。
注意
原理は証明せずに認めるものだと言ったではないか、と疑義が出てくるかもしれませんが、ハミルトン力学の枠組みの中では、原理3.1から原理3.3は紛れもなく証明なしに認める原理です。
ただ、何を出発点にするかというのは理論の組み立て方によって変わるもので、ラグランジュ力学の原理2.1から原理2.3を出発点にするなら原理3.1から原理3.3は導出結果ですし、同時に、ハミルトン力学の原理3.1から原理3.3を出発点にするなら原理2.1から原理2.3は導出結果になります。これらの解析力学の2つの記述方法は、同じ力学の別表現だと思うのがいいでしょう。
2 原理3.1の意味
ラグランジュ力学を出発点にするときは、一般化座標に共役な物理量として、ハミルトン力学でとても大事な一般化運動量を次のように定義します。
定義3.4(一般化運動量の定義)
系の一般化座標を\(\boldsymbol{q}=(q_1,q_2,…,q_N)\)、系に対応するラグランジアンを\(L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t)\)としたとき、\(\partial L/\partial \dot{q}_i\)を一般化運動量\(p_i\)と定義する。
3 定理3.2の意味
さてこれからラグランジュ力学を出発点として、ハミルトン力学の原理をつくっていこうと思いますが、この過程で欠かせないのが、ルジャンドル変換という作業です。
とくに、いまから行うルジャンドル変換の目標というのは、
ラグランジアンの引数の組\((\boldsymbol{q},\dot{\boldsymbol{q}},t)\)のうちの一般化速度を表す変数のいくつか、\((\dot{q}_{j_1},\dot{q}_{j_2},…,\dot{q}_{j_n})\)を、一般化運動量\((p_{j_1},p_{j_2},…,p_{j_n})\)に取り換えること
です。このとき定理3.5が成り立ちます。ただし、記号が複雑になるので、前もって以下のように記法を簡略化しておきます。
- 引数の組\((\boldsymbol{q},\dot{\boldsymbol{q}},t)\)のうちの速度を表す変数のいくつか、\((\dot{q}_{j_1},\dot{q}_{j_2},…,\dot{q}_{j_n})\)を、\(p_{j_1},p_{j_2},…,p_{j_n})\)に取り換えた変数の組を、\((\tilde{\boldsymbol{q}},\dot{\tilde{\boldsymbol{q}}},t)\)とかくことにします。
- \(p_j=\partial L/\partial \dot{q}_j\)を計算した式について、これを式変形して\(\dot{q}_j\)に関して解くことができますが、解いた結果の関数を\(\dot{q}_j \left( \tilde{\boldsymbol{q}},\dot{\tilde{\boldsymbol{q}}},t \right)\)とかくことにします。
- 系のラグランジアン\(L(\boldsymbol{q},\dot{\boldsymbol{q}},t)\)の引数のうちの\(\left\{ \dot{q}_{j_i} \right\}_{i=1}^n\)に、解いた結果の関数\(\left\{ \dot{q}_{j_i} \left( \tilde{\boldsymbol{q}},\dot{\tilde{\boldsymbol{q}}},t \right) \right\}_{i=1}^n \)を代入した結果の、\((\tilde{\boldsymbol{q}},\dot{\tilde{\boldsymbol{q}}},t)\)の関数を、\(\tilde{L}(\tilde{\boldsymbol{q}},\dot{\tilde{\boldsymbol{q}}},t)\)とかくことにします。
定理3.5(ルジャンドル変換)
系の一般化座標を\(\boldsymbol{q}=(q_1,q_2,…,q_N)\)、系に対応するラグランジアンを\(L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t)\)としたとき、\((\tilde{\boldsymbol{q}},\dot{\tilde{\boldsymbol{q}}},t)\)を引数とする新しい関数を以下のように定義する。
$$
R(\tilde{\boldsymbol{q}},\dot{\tilde{\boldsymbol{q}}},t) = \tilde{L}(\tilde{\boldsymbol{q}},\dot{\tilde{\boldsymbol{q}}},t) – \sum_{i=1}^n p_{j_i} \dot{q}_{j_i} \left( \tilde{\boldsymbol{q}},\dot{\tilde{\boldsymbol{q}}},t \right)
$$ここで、\(k \ne j_1,j_2,…,j_n\)に対しては、以下の方程式が成り立つ。
$$
\frac{\partial R}{\partial q_k} – \frac{d}{dt} \frac{\partial R}{\partial \dot{q}_k} =0
$$また、\(l = j_1,j_2,…,j_n\)に対しては、以下の方程式が成り立つ。
$$
\frac{\partial R}{\partial q_l} = \dot{p}_l \quad
\frac{\partial R}{\partial p_l} = – \dot{q}_l
$$
定理3.5の証明
\(k \ne j_1,j_2,…,j_n\)と\(l = j_1,j_2,…,j_n\)に対して、ラウシアン\(R = L – \sum_l p_l \dot{q}_l\)の全微分\(dR\)は、
\begin{align*}
dR &=dL – \sum_l (dp_l \dot{q}_l + p_l d\dot{q}_l) \\
&= \left( \sum_k \frac{\partial L}{\partial q_k} dq_k + \sum_k \frac{\partial L}{\partial \dot{q}_k} d\dot{q}_k + \sum_l \frac{\partial L}{\partial q_l} dq_l + \sum_l \frac{\partial L}{\partial \dot{q}_l} d\dot{q}_l + \frac{\partial L}{\partial t} dt \right) – \left( \sum_l (dp_l \dot{q}_l + p_l d\dot{q}_l) \right) \\
&= \left( \sum_k \frac{\partial L}{\partial q_k} dq_k + \sum_k p_k d\dot{q}_k + \sum_l \frac{\partial L}{\partial q_l} dq_l + \sum_l p_l d\dot{q}_l + \frac{\partial L}{\partial t} dt \right) – \left( \sum_l (dp_l \dot{q}_l + p_l d\dot{q}_l) \right) \\
&= \sum_k \frac{\partial L}{\partial q_k} dq_k + \sum_k p_k d\dot{q}_k + \sum_l \frac{\partial L}{\partial q_l} dq_l – \sum_l \dot{q}_l dp_l + \frac{\partial L}{\partial t} dt \qquad \text{(a)}
\end{align*}とかける。ただし、3つ目の等号は一般化運動量の定義を用いている。一方で、\(R\)の形式的な全微分を書き下すと、
$$
dR = \sum_k \frac{\partial R}{\partial q_k} dq_k + \sum_k \frac{\partial R}{\partial \dot{q}_k} d\dot{q}_k + \sum_l \frac{\partial R}{\partial q_l} dq_l + \sum_l \frac{\partial R}{\partial p_l} dp_l + \frac{\partial R}{\partial t} dt \quad \cdots \text{(b)}
$$とかけるから、(a)式と(b)式で各微小変化\(dq, d\dot{q}, dp\)の係数を比較して、\(k \ne j_1,j_2,…,j_n\)に対しては、以下が成り立つ。
$$
\frac{\partial R}{\partial q_k} = \frac{\partial L}{\partial q_k} \qquad \frac{\partial R}{\partial \dot{q}_k} = p_k = \frac{\partial L}{\partial \dot{q}_k} \qquad \text{(c)}
$$\(l = j_1,j_2,…,j_n\)に対しては、以下が成り立つ。
$$
\frac{\partial R}{\partial q_l} = \frac{\partial L}{\partial q_l} \qquad \frac{\partial R}{\partial p_l} = -\dot{q}_l \qquad \text{(d)}
$$
もとのラグランジアン\(L\)ではすべての変数に対してオイラー・ラグランジュ方程式が成り立っているから、\(k \ne j_1,j_2,…,j_n\)に対しては、
$$
\frac{d}{dt} \left( \frac{\partial L}{\partial \dot{q}_k} \right) – \frac{\partial L}{\partial q_k} = \frac{d}{dt} \left( \frac{\partial R}{\partial \dot{q}_k} \right) – \frac{\partial R}{\partial q_k} = 0
$$が成り立つ。ただし、1つめの等号で(c)式を用いている。また、\(l = j_1,j_2,…,j_n\)に対しては
$$
\frac{d}{dt} \left( \frac{\partial L}{\partial \dot{q}_l} \right) – \frac{\partial L}{\partial q_l} = \frac{d}{dt} p_k – \frac{\partial R}{\partial q_l} = 0
$$が成り立つ。ただし、1つ目の等号で(d)式の1式目と、一般化運動量の定義を用いている。\(\frac{\partial R}{\partial p_l} = – \dot{q}_l\)は(d)式の2式目そのものであるので、以上より示された。□
さらに、この特別な場合として、
ラグランジアンの引数の組\((\boldsymbol{q},\dot{\boldsymbol{q}},t)\)のうちの一般化速度を表す変数のすべて、\((\dot{q}_{j_1},\dot{q}_{j_2},…,\dot{q}_{j_N})\)を、一般化運動量\(p_{j_1},p_{j_2},…,p_{j_N})\)に取り換えること
を考えます。このときの定理3.5にしたがって定義した新しい関数の逆符号を、ハミルトニアンとしましょう。
定義3.6(ハミルトニアンの定義)
系の一般化座標を\(\boldsymbol{q}=(q_1,q_2,…,q_N)\)、系に対応するラグランジアンを\(L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t)\)、系の一般化運動量を\(\boldsymbol{p}=(p_1,p_2,…,p_N)\)としたとき、以下のように定義した物理量\(H(\boldsymbol{q}, \boldsymbol{p}, t)\)をハミルトニアンという。
$$
H(\boldsymbol{q}, \boldsymbol{p}, t) = \sum_{i=1}^N p_i \dot{q}_i(\boldsymbol{q}, \boldsymbol{p}, t) – L \Big(\boldsymbol{q}, \dot{\boldsymbol{q}}(\boldsymbol{q}, \boldsymbol{p}, t), t \Big)
$$
4 定理3.3の意味
このとき、定理3.5より直ちに、ハミルトンの正準方程式
$$
\frac{\partial H}{\partial q_i} = – \dot{p}_i \qquad
\frac{\partial H}{\partial p_i} = \dot{q}_i \qquad (i=1,2,…,N)
$$が成り立つことが分かるでしょう。こうして、ラグランジュ力学の原理をもとに、ハミルトン力学の原理を組み立てることができました。
さて、ここまでがハミルトン力学の出発点で、原理3.1から原理3.3をもとにしていろいろな議論をしていくのがハミルトン力学とよばれる体系です。ちなみにそれぞれの原理や体系が持つイメージとしては、ラグランジュ力学が「始点から終点までの最適なルート探し」という大局的な視点を持つのに対して、ハミルトン力学は「現在の状態から次の瞬間にどう状態が変化するか」という時間発展的な視点を持っているような具合です。
さて、ここまでがハミルトン力学の出発点です。ここからは、原理から成り立つ定理をどんどん見ていきましょう。
5 位相空間
ここからは正準方程式から成り立つ「定理」をいろいろと考えていくのですが、ハミルトン力学を扱うにあたって欠かせない特徴的な道具として、位相空間とポアソン括弧があります。
まずは位相空間から、これは次のように定義されます。
定義3.7(位相空間の定義)
ある自由度\(N\)の系に対して、系の一般化座標\(q_i\)とそれに共役な一般化運動量\(p_i\)の計\(2N\)の変数を座標とするような\(2N\)次元の空間のことを、その系の位相空間と定義する。
■位相空間を考える動機
ハミルトン力学で、わざわざ「位相空間」という新しい空間を導入するのは、
配置が与えられればそのあと次の時刻での運動が決定してしまうという特殊な空間
が欲しかったためです。
例えば、私たちが現実で粒子の運動をみるときは、ある時刻を切り取ると粒子が3次元空間中のどこかにいるという”配置”が与えられます。これは「実空間」とよばれ、質点が\(N\)個あっても3次元の空間で運動を表現しますね。
それから、系の配置を決めるために必要な変数を全部まとめて1点で表す空間を「配位空間」といいます。これは質点が\(N\)個あってそれぞれが3自由度で運動する状況なら\(3N\)次元の空間になりますし、配位空間の軸は必ずしも\(x,y,z\)ではなくて角度変数や原点からの距離など何でも構わない一般化座標であるという点で「実空間」と異なります。
さて、これら「実空間」や「配位空間」で運動をみるときは、同じ配置にいてもその後の運動が1通りとは限らず、たとえば1次元の質点が位置\(x=0\)にいるとしても、そのときの速度によってその後の運動は多種多様で決めきれないという特徴があります。
これに対して、配位空間中の配置よりも多くの情報を含んでいて、配置が与えられればそのあと次の時刻での運動が決定できる空間として、「位相空間」が導入されるわけですね。
■実際に描いてみる
では、先ほど定義した位相空間を実際に描いてみましょう。
例3.8
古典力学における\(z\)軸方向の1次元放物運動を考える。これに対する位相空間は、位置を表す\(q=z\)とそれに共役な\(z\)軸方向の運動量\(p=p_z\)の2つを変数とする2次元の平面になる。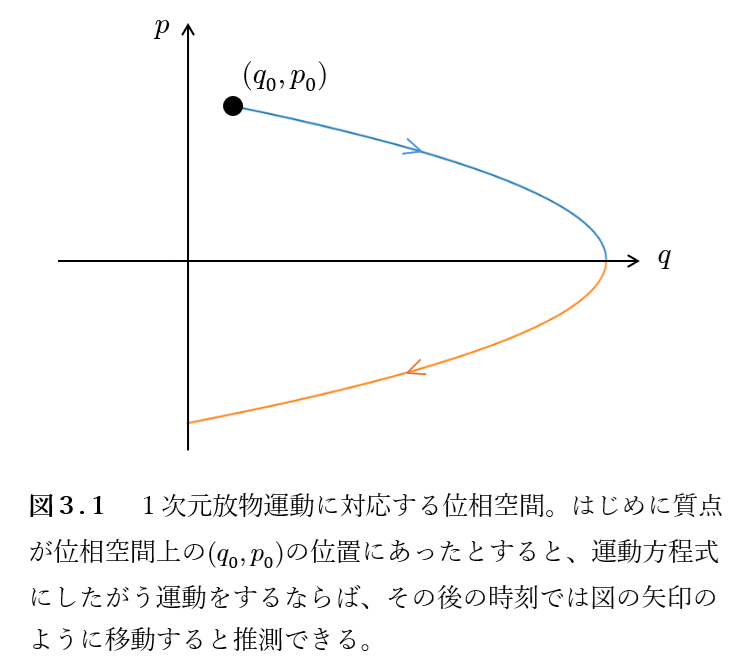
図3.1のように、たとえばはじめに質点が位相空間上の\(q_0,p_0\)の位置にあったとする。これは\(p_0 >0\)より、\(z\)座標が\(q_0\)であるような、\(z\)軸方向に正の速度をもつ質点に対応する。この質点はニュートンの運動方程式にしたがう運動をするならば、やがて最高点に達してから落下するので、とりあえず\(z >0\)の範囲では図の矢印のように配位空間上を移動すると推測できる。
さて、いまやったことは、はじめに質点が位相空間上の\(q_0,p_0\)の位置にいたという情報だけから、そのあと位相空間上でどういう運動をするかを決定するということです。まさしく、先ほど述べた位相空間上での配置が与えられればそのあと次の時刻での運動が直ちに決定してしまうという位相空間の特徴を使っていますね。
■位相空間上の運動
無論、いまは運動を実際に頭の中で想像したので、想像できない運動だったらどうするのかとか疑義があるのは当然です。ところが実際には、「位相空間上での配置からそのあとの位相空間上での運動を決定する」のは、別に運動が想像できなくとも、その系のハミルトニアンさえわかれば可能です。これについて見ていきましょう。
定理3.9
位相空間上の位置\((\boldsymbol{q},\boldsymbol{p})\)における、位相空間上の時間発展の速度ベクトルは\((\nabla_{\boldsymbol{p}}H, -\nabla_{\boldsymbol{q}}H)\)とかける。
定理3.9の証明
位相空間上の時間発展の速度ベクトルは\((\dot{\boldsymbol{q}}, \dot{\boldsymbol{p}})\)であるが、正準方程式\(\dot{q}_i= \frac{\partial H}{\partial p_i}, \dot{p}_i= -\frac{\partial H}{\partial q_i}\)より、\((\dot{\boldsymbol{q}}, \dot{\boldsymbol{p}})=(\nabla_{\boldsymbol{p}}H, -\nabla_{\boldsymbol{q}}H)\)として示された。□
系3.10
位相空間上の時間発展の速度ベクトルは、位相空間上のハミルトニアンの勾配\((\nabla_{\boldsymbol{q}}H, \nabla_{\boldsymbol{p}}H)\)と直交する。
系3.10の証明
位相空間上の時間発展の速度ベクトル\((\nabla_{\boldsymbol{p}}H, -\nabla_{\boldsymbol{q}}H)\)と、位相空間上のハミルトニアンの勾配\((\nabla_{\boldsymbol{q}}H, \nabla_{\boldsymbol{p}}H)\)の内積をとると、\(\left( \sum_{i=1}^N \frac{\partial H}{\partial q_i} \frac{\partial H}{\partial p_i} \right) – \left( \sum_{i=1}^N \frac{\partial H}{\partial q_i} \frac{\partial H}{\partial p_i} \right) = 0\)より示された。□
系3.11(エネルギー保存則)
ハミルトニアンが時刻\(t\)を直接の変数として含まないとき、正準方程式に従う運動では、ハミルトニアンは時間変化に対して保存する。
系3.11の証明
時刻\(t\)を直接の変数として含まないハミルトニアン\(H(\boldsymbol{q}, \boldsymbol{p})\)の時間による全微分は、合成関数の微分より、
$$
\frac{dH}{dt} = \sum_{i=1}^N \frac{\partial H}{\partial q_i} \dot{q}_i + \sum_{i=1}^N \frac{\partial H}{\partial p_i} \dot{p}_i = (\nabla_{\boldsymbol{q}}H, \nabla_{\boldsymbol{p}}H) \cdot (\dot{\boldsymbol{q}}, \dot{\boldsymbol{p}}) = (\nabla_{\boldsymbol{q}}H, \nabla_{\boldsymbol{p}}H) \cdot (\nabla_{\boldsymbol{p}}H, -\nabla_{\boldsymbol{q}}H) = \left( \sum_{i=1}^N \frac{\partial H}{\partial q_i} \frac{\partial H}{\partial p_i} \right) – \left( \sum_{i=1}^N \frac{\partial H}{\partial q_i} \frac{\partial H}{\partial p_i} \right) = 0
$$となる。ただし、3つ目の等号は、正準方程式に従う運動において\((\dot{\boldsymbol{q}}, \dot{\boldsymbol{p}})=(\nabla_{\boldsymbol{p}}H, -\nabla_{\boldsymbol{q}}H)\)とかけることを用いた。ハミルトニアンの時間微分がゼロであることは、ハミルトニアンが時間変化に対して保存するということを意味するので、示された。□
系3.11については実は、例2.10と主張自体は同じで、証明をハミルトン力学の範囲で書き直したということになります。なお、ハミルトン力学で保存則をいかに扱うかは、また別稿で話します。
なんにせよ、ここまで話したことはとても重要です。系のハミルトニアンが分かれば、位相空間上の各位置に対して速度ベクトルが与えられる、ということは位相空間上には、まるで空間中に設定された流れのように速度ベクトル場が敷き詰められていて、系の状態\(\boldsymbol{q},\boldsymbol{p}\)はそれに流されるように移ろっていくということが分かります。
例3.12
具体的な力学系として、古典力学における1次元調和振動子、1次元放物運動、単振り子の3つを想定し、それぞれのケースで位相空間上の速度ベクトル場を実際に計算してみる。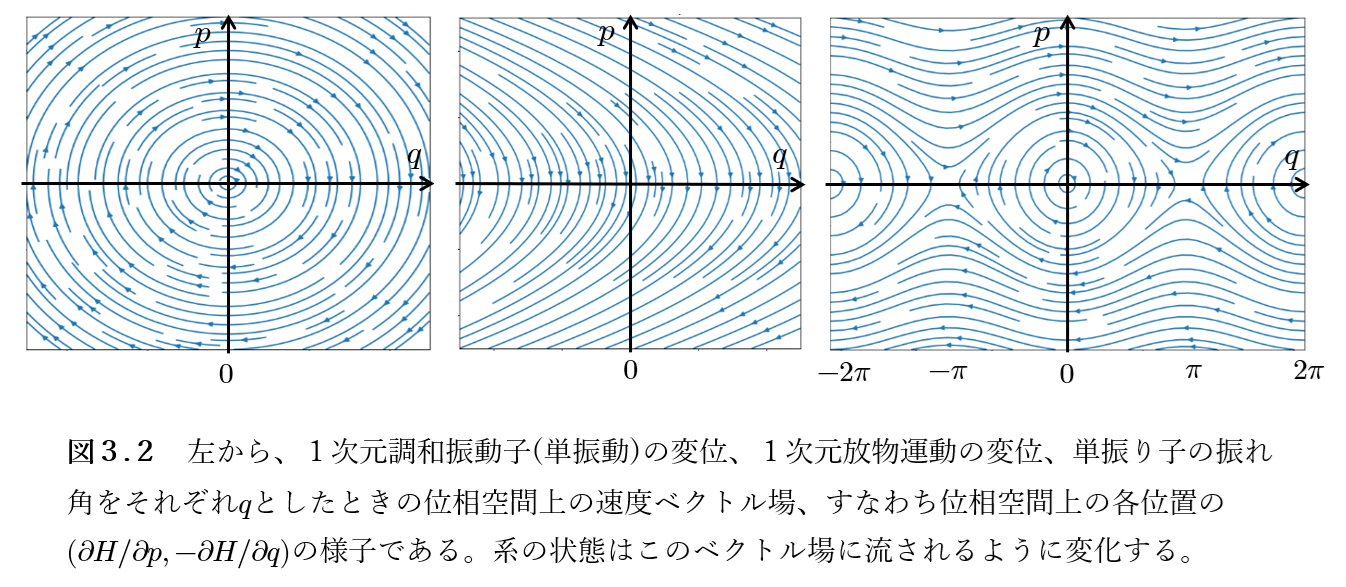
【1次元調和振動子の場合】
質量を\(m\)、バネ定数を\(k\)、変位を\(q\)とすると、ラグランジアン、変位に共役な運動量、ハミルトニアンは順に、
$$
L = \frac{1}{2}m\dot{q}^2 – \frac{1}{2}kq^2 \qquad p = \frac{\partial L}{\partial \dot{q}} = m\dot{q} \qquad H = p \left(\frac{p}{m}\right) – \left( \frac{1}{2}m\left(\frac{p}{m}\right)^2 – \frac{1}{2}kq^2 \right) = \frac{p^2}{2m} + \frac{1}{2}kq^2
$$となる。これより、位相空間上の位置\((q, p)\)における速度ベクトルは、
$$
(\dot{q}, \dot{p}) = \left( \frac{\partial H}{\partial p}, -\frac{\partial H}{\partial q} \right) = \left( \frac{p}{m}, -kq \right)
$$とかけるので、その速度ベクトル場は図2.1の一番左の図のようになる。この図からどんな運動かを読み取ろう。矢印を繋ぐと、原点を中心とした時計回りの渦になっていて、行ったり来たりを繰り返す振動をするとわかる。また、図の真ん中の原点\((q, p) = (0, 0)\)は、バネが自然長でかつ静止している状態だが、この点では速度ベクトルも\((\dot{q}, \dot{p})\)も\((0, 0)\)になるため、ここが安定な平衡点であることもわかる。
【1次元放物運動の場合】
質量を\(m\)、変位を\(q\)とすると、ラグランジアン、変位に共役な運動量、ハミルトニアンは順に、
$$
L = \frac{1}{2}m\dot{q}^2 – mgq \qquad p = \frac{\partial L}{\partial \dot{q}} = m\dot{q} \qquad H = p \left(\frac{p}{m}\right) – \left( \frac{1}{2}m\left(\frac{p}{m}\right)^2 – mgq \right) = \frac{p^2}{2m} + mgq
$$となる。これより、位相空間上の位置\((q, p)\)における速度ベクトルは、
$$
(\dot{q}, \dot{p}) = \left( \frac{\partial H}{\partial p}, -\frac{\partial H}{\partial q} \right) = \left( \frac{p}{m}, -mg \right)
$$とかけるので、その速度ベクトル場は図2.1の真ん中の図のようになる。この図からどんな運動かを読み取ろう。図を見ると、すべての矢印が全体的に下へ下へと向かって流れているが、これは重力によって常に下向きに引っ張られ、運動量が減り続けているという事実を視覚化しているとわかる。
【単振り子の場合】
質量を\(m\)、糸の長さを\(l\)、最下点からの振れ角を\(q\)とすると、ラグランジアン、変位に共役な運動量、ハミルトニアンは順に、
$$
L = \frac{1}{2}ml^2\dot{q}^2 – mgl(1 – \cos q) \qquad
p = \frac{\partial L}{\partial \dot{q}} = ml^2\dot{q} \qquad
H = \frac{p^2}{2ml^2} + mgl(1 – \cos q)
$$となる。これより、位相空間上の位置\((q, p)\)における速度ベクトルは、
$$
(\dot{q}, \dot{p}) = \left( \frac{\partial H}{\partial p}, -\frac{\partial H}{\partial q} \right) = \left( \frac{p}{ml^2}, -mgl \sin q \right)
$$とかけるので、その速度ベクトル場は図2.1の一番右の図のようになる。この図からどんな運動かを読み取ろう。
まず、中心付近は閉じた軌道をしているが、これは1次元調和振動子のときと類似しており、行ったり来たりを繰り返す振動をするとわかる。続いて、ハミルトニアン\(H\)が十分大きい条件では、振り子が最高点\(q = \pi, -\pi\)を通過してコマのように同じ方向に何周も回転し続ける状態になるとわかる。上半分の流線は右へ流れていますがこれは時計回りに延々と回転し続けているため、下半分の流線は左へ流れているがこれは反時計回りに延々と回転し続けているため、流線が波打っているのは重力の影響で回転に伴う加減速を繰り返しているためである。
なお、図の\(q = \pi, -\pi\)の横軸上の点に注目すると、この点では速度ベクトルが\((\dot{q}, \dot{p})\)も\((0, 0)\)になっており、振り子がギリギリ真上に到達するだけのエネルギーを与えられ、無限の時間をかけて真上でピタッと止まるという不安定な平衡点を表しているとわかる。
さて、ここでは簡単な例を扱ったため、実際の運動を想像しながら話しましたが、位相空間の醍醐味は想像できない運動の時間発展をハミルトニアンから予想できることにあります。平衡点やその安定性を議論したり、周期運動かどうかを判定したり、保存則で許される運動領域を調べたりするのが位相空間の流れを見るだけで済んでしまう、という意味で位相空間がいかに強力なものか分かっていただけたでしょうか。
■位相空間の流れの特徴
ここからは、位相空間上の速度ベクトル場に関して成り立つ定理を紹介していきます。
定理3.13
位相空間上の速度ベクトル場の発散は、いたるところゼロである。
定理3.13の証明
位相空間上の速度ベクトル場\((\nabla_{\boldsymbol{p}}H, -\nabla_{\boldsymbol{q}}H)\)の発散をとると、以下のように示される。
$$
\nabla \cdot \begin{pmatrix} \nabla_{\boldsymbol{p}}H \\ -\nabla_{\boldsymbol{q}}H \end{pmatrix} = \left( \sum_{i=1}^N \frac{\partial}{\partial q_i} \frac{\partial H}{\partial p_i} \right) – \left( \sum_{i=1}^N \frac{\partial}{\partial p_i} \frac{\partial H}{\partial q_i} \right) = 0
$$□
これは、位相空間上に速度ベクトル場をびっしりかいたときに、どこにも湧き出し口や吸い込み口がないということです。湧き出し口や吸い込み口がある場の例としては静電場がわかりやすく、正電荷から電場が湧き出し、負電荷に静電場が吸い込まれていますが、位相空間上の速度ベクトル場はそのような場の源となるものがなくただ流れているだけだという意味ですよ。
定理3.14(リウヴィルの定理)
正準方程式にしたがって時間発展する、位相空間内の任意の領域\(D\)を考えたとき、その形状は一般に変化するが、位相空間における体積は保存される。
定理3.14の証明
いま位相空間内の微小超直方体領域\(D\)として、
$$
[q_1, q_1+\delta q_1] \times [q_2, q_2+\delta q_2] \times … [q_N, q_N+\delta q_N] \times [p_1, p_1+\delta p_1] \times [p_2, p_2+\delta p_2] \times … [p_N, p_N+\delta p_N]
$$を考えたとき、正準方程式にしたがう\(\delta t\)秒間の時間発展によってこの領域の形状は変化するが、位相空間における超体積は変化しないことを示せばよい。位相空間の座標について\(\boldsymbol{x} = (q_1,…, q_N, p_1,…, p_N)\)とおき、また各点での位相空間上の速度ベクトルを\(\boldsymbol{v}(\boldsymbol{x}) = (\dot{q}_1,…, \dot{q}_N, \dot{p}_1, …, \dot{p}_N)\)とかくこととする。さて、正準方程式にしたがう\(\delta t\)秒間の時間発展によって、
はじめ\(\boldsymbol{x}\)にいた粒子は\(\boldsymbol{x} + \boldsymbol{v}(\boldsymbol{x})\delta t\)に、
はじめ\(\boldsymbol{x} + \delta q_j \boldsymbol{e}_{q_j}\)にいた粒子は\(\boldsymbol{x} + \delta q_j \boldsymbol{e}_{q_j} + \boldsymbol{v}(\boldsymbol{x} + \delta q_j \boldsymbol{e}_{q_j})\delta t = \boldsymbol{x} + \delta q_j \boldsymbol{e}_{q_j} + \left( \boldsymbol{v}(\boldsymbol{x}) + \frac{\partial \boldsymbol{v}}{\partial q_j}\delta q_j \right)\delta t\)に、
はじめ\(\boldsymbol{x} + \delta p_j \boldsymbol{e}_{p_j}\)にいた粒子は\(\boldsymbol{x} + \delta p_j \boldsymbol{e}_{p_j} + \boldsymbol{v}(\boldsymbol{x} + \delta p_j \boldsymbol{e}_{p_j})\delta t = \boldsymbol{x} + \delta p_j \boldsymbol{e}_{p_j} + \left( \boldsymbol{v}(\boldsymbol{x}) + \frac{\partial \boldsymbol{v}}{\partial p_j}\delta p_j \right)\delta t\)に移動するので、\(\delta t\)秒後の領域\(D\)は超平行多面体となる。この超平行多面体をつくる新しい\(2N\)本のベクトルは、移動後の各点からベクトルの引き算をすると求められ、
$$
\left\{ \boldsymbol{E}_{q_j} \right\}_{j=1}^N = \left\{ \left( \boldsymbol{e}_{q_j} + \frac{\partial \boldsymbol{v}}{\partial q_j}\delta t \right) \delta q_j \right\}_{j=1}^N \qquad \left\{ \boldsymbol{E}_{p_j} \right\}_{j=1}^N =\left\{ \left( \boldsymbol{e}_{p_j} + \frac{\partial \boldsymbol{v}}{\partial p_j}\delta t \right) \delta p_j \right\}_{j=1}^N
$$となる。この超平行多面体の超体積\(V’\)を求める。線形代数の定理より、超体積\(V’\)は、新しい辺のベクトルを列ベクトルとして並べた行列の行列式の絶対値になることが示されているから、
\begin{align*}
&V’ = \left| \det \left( \boldsymbol{E}_{q_1} \boldsymbol{E}_{q_2} … \boldsymbol{E}_{q_N} \boldsymbol{E}_{p_1} \boldsymbol{E}_{p_2} … \boldsymbol{E}_{p_N} \right) \right| = \left| \space \det \left[ \begin{pmatrix} \delta q_1 + \left( \frac{\partial \dot{q}_1}{\partial q_1} \delta q_1 \right)\delta t \\ \left( \frac{\partial \dot{q}_2}{\partial q_1} \delta q_1 \right)\delta t \\ \vdots \\ \left( \frac{\partial \dot{p}_N}{\partial q_1} \delta q_1 \right)\delta t \end{pmatrix} … \begin{pmatrix} \left( \frac{\partial \dot{q}_1}{\partial p_N} \delta p_N \right)\delta t \\ \left( \frac{\partial \dot{q}_2}{\partial p_N} \delta p_N \right)\delta t \\ \vdots \\ \delta p_N + \left( \frac{\partial \dot{p}_N}{\partial p_N} \delta p_N \right)\delta t \end{pmatrix} \right] \right| \\[4pt]
&= \left| \space \det \left[ \delta q_1 \begin{pmatrix} 1 + \frac{\partial \dot{q}_1}{\partial q_1} \delta t \\ \frac{\partial \dot{q}_2}{\partial q_1} \delta t \\ \vdots \\ \frac{\partial \dot{p}_N}{\partial q_1} \delta t \end{pmatrix} … \delta p_N \begin{pmatrix} \frac{\partial \dot{q}_1}{\partial p_N} \delta t \\ \frac{\partial \dot{q}_2}{\partial p_N} \delta t \\ \vdots \\ 1+ \frac{\partial \dot{p}_N}{\partial p_N} \delta t \end{pmatrix} \right] \right|\\[4pt]
&= (\delta q_1 \dots \delta q_N \delta p_1 \dots \delta p_N) \times \left| \det \begin{pmatrix} 1 + \frac{\partial \dot{q}_1}{\partial q_1} \delta t & \dots & \frac{\partial \dot{q}_1}{\partial p_N} \delta t \\ \vdots & \ddots & \vdots \\ \frac{\partial \dot{p}_N}{\partial q_1} \delta t & \dots & 1 + \frac{\partial \dot{p}_N}{\partial p_N} \delta t \end{pmatrix} \right| = (\delta q_1 \dots \delta q_N \delta p_1 \dots \delta p_N)
\end{align*}とかける。ただし、5つ目の等号は、微小量\(\delta t\)については2次以上の項を捨てているので、行列式の計算は対角成分の積に他ならないことから、
\begin{align*}
&\left| \det \begin{pmatrix} 1 + \frac{\partial \dot{q}_1}{\partial q_1} \delta t & \dots & \frac{\partial \dot{q}_1}{\partial p_N} \delta t \\ \vdots & \ddots & \vdots \\ \frac{\partial \dot{p}_N}{\partial q_1} \delta t & \dots & 1 + \frac{\partial \dot{p}_N}{\partial p_N} \delta t \end{pmatrix} \right| \approx \left( 1 + \frac{\partial \dot{q}_1}{\partial q_1} \delta t \right) \times \dots \times \left( 1 + \frac{\partial \dot{p}_N}{\partial p_N} \delta t \right) \\
&\approx 1 + \left( \frac{\partial \dot{q}_1}{\partial q_1} + \dots + \frac{\partial \dot{q}_N}{\partial q_N} + \frac{\partial \dot{p}_1}{\partial p_1} + \dots + \frac{\partial \dot{p}_N}{\partial p_N} \right) \delta t = 1+ \sum_{i=1}^N \left( \frac{\partial \dot{q}_i}{\partial q_i} + \frac{\partial \dot{p}_i}{\partial p_i} \right) \\
&= 1+ \sum_{i=1}^N \left( \frac{\partial}{\partial q_i}\left(\frac{\partial H}{\partial p_i}\right) + \frac{\partial}{\partial p_i}\left(-\frac{\partial H}{\partial q_i}\right) \right) = 1
\end{align*}という計算が成り立つことを用いている。ただし、この計算の4つ目の等号は正準方程式を用いている。\((\delta q_1 \dots \delta q_N \delta p_1 \dots \delta p_N)\)というのはもとの超直方体の超体積より、新しい超平行多面体ともとの超直方体の超体積が等しいことがいえたので、以上より示された。□
6 ポアソン括弧
次に、ポアソン括弧について、これは次のように定義されます。
定義3.15(ポアソン括弧の定義)
一般化座標\(\boldsymbol{q}\)、一般化運動量\(\boldsymbol{p}\)および時刻\(t\)の関数\(A(\boldsymbol{q},\boldsymbol{p},t)\)と\(B(\boldsymbol{q},\boldsymbol{p},t)\)について、
$$
\{A,B\} \equiv \sum_{i=1}^N \left( \frac{\partial A}{\partial q_i}\frac{\partial B}{\partial p_i} – \frac{\partial B}{\partial q_i}\frac{\partial A}{\partial p_i} \right)
$$として、ポアソン括弧\(\{ A,B\}\)を定義する。
これが定義です。これだけみてもまだ使いどころが思いつかないかもしれませんが、一つの使い方としては、\(\boldsymbol{q}, \boldsymbol{p},t\)の関数の時間微分を、次のように簡単に書けるようになりますよ。
系3.16
一般化座標\(\boldsymbol{q}\)、一般化運動量\(\boldsymbol{p}\)および時刻\(t\)の関数\(A(\boldsymbol{q},\boldsymbol{p},t)\)について、以下が成り立つ。
$$
\frac{dA}{dt} = \{ A,H \} + \frac{\partial A}{\partial t}
$$
系3.16の証明
一般化座標\(\boldsymbol{q}\)、一般化運動量\(\boldsymbol{p}\)および時刻\(t\)の関数\(A(\boldsymbol{q},\boldsymbol{p},t)\)について、時間による全微分をすると、
$$
\frac{dA}{dt} = \sum_{i=1}^N \left( \frac{\partial A}{\partial q_i}\frac{d q_i}{d t} + \frac{\partial A}{\partial p_i}\frac{d p_i}{d t} \right) + \frac{\partial A}{\partial t} = \sum_{i=1}^N \left( \frac{\partial A}{\partial q_i}\frac{\partial H}{\partial p_i} – \frac{\partial A}{\partial p_i}\frac{\partial H}{\partial q_i} \right) + \frac{\partial A}{\partial t} = \{ A,H \} + \frac{\partial A}{\partial t}
$$とかけるので示された。ただし、1つ目の等号は合成関数の微分、2つ目の等号は正準方程式、3つ目の等号はポアソン括弧の定義を用いている。□
これより、とくに関数\(A(\boldsymbol{q},\boldsymbol{p},t)\)が時刻\(t\)を直接の変数として含まない場合は、\(\frac{dA}{dt} = \{ A,H \} \)というように、時間微分をポアソン括弧だけでかけることになります。
また、ハミルトン力学で原理とした正準方程式もポアソン括弧で次のようにかくことができます。
$$
\dot{p}_i = -\frac{\partial H}{\partial q_i} = \sum_{j=1}^N \left( \frac{\partial p_i}{\partial q_j}\frac{\partial H}{\partial p_j} – \frac{\partial H}{\partial q_j}\frac{\partial p_i}{\partial p_j} \right) = \{ p_i,H \}
$$$$
\dot{q}_i = \frac{\partial H}{\partial p_i} = = \sum_{j=1}^N \left( \frac{\partial q_i}{\partial q_j}\frac{\partial H}{\partial p_j} – \frac{\partial H}{\partial q_j}\frac{\partial q_i}{\partial p_j} \right) = \{ q_i,H \}
$$とりあえず、このように今まで扱ってきた数式の様々な部分をポアソン括弧の形式で書けることが分かりました。”記法の簡略化”というのは、一つの使い道であるようですね。
■ポアソン括弧の数学的性質
そのほかにもポアソン括弧の使い道はたくさんありますが、その前に、このように定義したポアソン括弧の数学的性質を見ていきます。
定理3.17
ポアソン括弧において、以下が成立する。
(i)反対称性 \(\{ A,B \} = -\{ B,A \}\)
(ii)双線形性 \(\{ \alpha A+\beta B,C \} = \alpha \{ A,C \} + \beta \{ B,C \} \quad \{ A, \beta B+\gamma C \} = \beta \{ A,B \} + \gamma \{ A,C \}\)
(iii)ライプニッツ則 \( \{ A,BC \} = \{ A,B \}C+B\{ A,C \} \quad \{ AB,C \} = \{ A,C \}B+A\{ B,C \} \)
(iv)ヤコビ恒等式 \( \{ A,\{ B,C \} \}+\{ B,\{ C,A \} \}+\{ C,\{ A,B \} \} \)
定理3.17の証明
(i)の証明
定義より、以下のように変形できるので示される。
$$
\{A, B\} = \frac{\partial A}{\partial q_i} \frac{\partial B}{\partial p_i} – \frac{\partial A}{\partial p_i} \frac{\partial B}{\partial q_i} = – \left( \frac{\partial B}{\partial q_i} \frac{\partial A}{\partial p_i} – \frac{\partial B}{\partial p_i} \frac{\partial A}{\partial q_i} \right) = -\{B, A\}
$$(ii)の証明
第1式は、定義と微分の線形性より、以下のように変形できるので示される。
\begin{align*}
& \{\alpha A + \beta B, C\} = \frac{\partial (\alpha A + \beta B)}{\partial q_i} \frac{\partial C}{\partial p_i} – \frac{\partial (\alpha A + \beta B)}{\partial p_i} \frac{\partial C}{\partial q_i} = \left( \alpha \frac{\partial A}{\partial q_i} + \beta \frac{\partial B}{\partial q_i} \right) \frac{\partial C}{\partial p_i} – \left( \alpha \frac{\partial A}{\partial p_i} + \beta \frac{\partial B}{\partial p_i} \right) \frac{\partial C}{\partial q_i} \\[4px]
&= \alpha \left( \frac{\partial A}{\partial q_i} \frac{\partial C}{\partial p_i} – \frac{\partial A}{\partial p_i} \frac{\partial C}{\partial q_i} \right) + \beta \left( \frac{\partial B}{\partial q_i} \frac{\partial C}{\partial p_i} – \frac{\partial B}{\partial p_i} \frac{\partial C}{\partial q_i} \right) = \alpha\{A, C\} + \beta\{B, C\}
\end{align*}第2式も同様に計算すると示される。
(iii)の証明
第1式は、定義と積の微分より、以下のように変形できるので示される。
\begin{align*}
&\{A, BC\} = \frac{\partial A}{\partial q_i} \frac{\partial (BC)}{\partial p_i} – \frac{\partial A}{\partial p_i} \frac{\partial (BC)}{\partial q_i} = \frac{\partial (BC)}{\partial p_i} = \frac{\partial B}{\partial p_i}C + B\frac{\partial C}{\partial p_i} \\[4px]
&= \left( \frac{\partial A}{\partial q_i} \frac{\partial B}{\partial p_i} – \frac{\partial A}{\partial p_i} \frac{\partial B}{\partial q_i} \right) C + B \left( \frac{\partial A}{\partial q_i} \frac{\partial C}{\partial p_i} – \frac{\partial A}{\partial p_i} \frac{\partial C}{\partial q_i} \right) = \{A, B\}C + B\{A, C\}
\end{align*}(iv)の証明
左辺を計算すると出てくる項は、\(A\)の2階微分が含まれる項、\(B\)の2階微分が含まれる項、\(C\)の2階微分が含まれる項に分けられる。ここで、\(C\)の2階微分が含まれる項だけに注目すると、第1項からの寄与
$$
\sum_{i=1}^N \sum_{j=1}^N \left( \frac{\partial A}{\partial q_i} \frac{\partial B}{\partial q_j} \frac{\partial^2 C}{\partial p_i \partial p_j} – \frac{\partial A}{\partial p_i} \frac{\partial B}{\partial q_j} \frac{\partial^2 C}{\partial q_i \partial p_j} \right)
$$と第2項からの寄与
$$
\sum_{i=1}^N \sum_{j=1}^N \left( – \frac{\partial B}{\partial q_i} \frac{\partial A}{\partial q_j} \frac{\partial^2 C}{\partial p_i \partial p_j} + \frac{\partial B}{\partial p_i} \frac{\partial A}{\partial q_j} \frac{\partial^2 C}{\partial q_i \partial p_j} \right)
$$は打ち消し合ってゼロになるため、\(C\)の2階微分が含まれる項は消える。同様に、\(A\)の2階微分が含まれる項、\(B\)の2階微分が含まれる項も消えるため、\(\{A, \{B, C\}\} + \{B, \{C, A\}\} + \{C, \{A, B\}\} = 0\)となることが示された。□
いまみたことは、実際の計算で大いに用いることになるので、覚えておいてください。
■ポアソン括弧の物理的性質①―無限小変換による変化の割合
すこしだけ、物理から離れていましたが、いまからは戻って、ポアソン括弧\(\{A,B\}\)の物理的意味を見ていきます。さてポアソン括弧ですが、代表的な物理的解釈としては、
- ポアソン括弧は、ある物理量\(B\)を生成子とする無限小変換によって、物理量\(A\)はどう変化するかを表す。
- ポアソン括弧は、物理量\(A\)が時間発展に対して保存するかを判定する。
- ポアソン括弧は、物理量\(B\)を生成子とする変換と物理量\(A\)を生成子とする変換が独立しているかを判定する。
- ポアソン括弧は、ある変換\((\boldsymbol{q}, \boldsymbol{p}) \rightarrow (\boldsymbol{Q}, \boldsymbol{P})\)が正準変換であるかを判定する。
というようなものがあります。順に1つ目からみていきましょう。まずは次のようにして、物理量を生成子とする無限小変換を定義します。
定義3.18(物理量を生成子とする無限小変換の定義)
微小なパラメータ\(\epsilon\)に対して、座標\(q_i\)と運動量\(p_i\)が
$$
\delta q_i = \epsilon \frac{\partial X}{\partial p_i} \qquad \delta p_i = -\epsilon \frac{\partial X}{\partial q_i}
$$のように変化する無限小変換を、ある物理量\(X(\boldsymbol{q}, \boldsymbol{p}, t)\)を生成子とする無限小変換と定義する。
なんでこんなものを定義するのかと疑問に思うかもしれませんが、この形式化によって
- 物理量を単なる測定値というだけでなく「空間に対する操作」としても扱えるようになる
- 量子力学では物理量が「演算子」として扱われるが、この移行がスムーズになる
といった目的があります。例としていくつか、物理量を生成子とする無限小変換の例を出してみましょう。
例3.19(運動量\(p_i\)を生成子とする無限小変換)
この変換によって、座標\(q_i\)と運動量\(p_i\)はそれぞれ
$$
\delta q_i = \epsilon \frac{\partial p_i}{\partial p_i} = \epsilon \qquad \delta p_i = -\epsilon \frac{\partial p_i}{\partial q_i} = 0
$$のように変化するから、運動量\(p_i\)を生成子とする無限小変換は\(q_i\)方向への無限小平行移動そのものである。このため、運動量は空間並進の生成子ともよばれる。
例3.20(角運動量の\(z\)成分\(L_z\)を生成子とする無限小変換)
\(i\)番目の粒子の3次元直交座標ベクトルを\(\boldsymbol{r}_i=(x_i,y_i,z_i)\)、対応する運動量を\(\boldsymbol{p}_i=(p_{x,i},p_{y,i},p_{z,i})\)とすると、この変換でこれらはそれぞれ
$$
\delta x_i = \epsilon \frac{\partial L_z}{\partial p_{x,i}} = \epsilon \frac{\partial}{\partial p_{x,i}} \left( \sum_{j=1}^N x_j p_{y,j} – y_j p_{x,j} \right) = -\epsilon y_i
$$$$
\delta y_i = \epsilon \frac{\partial L_z}{\partial p_{y,i}} = \epsilon \frac{\partial}{\partial p_{y,i}} \left( \sum_{j=1}^N x_j p_{y,j} – y_j p_{x,j} \right) = \epsilon x_i
$$$$
\delta z_i = \epsilon \frac{\partial L_z}{\partial p_{z,i}} = \epsilon \frac{\partial}{\partial p_{z,i}} \left( \sum_{j=1}^N x_j p_{y,j} – y_j p_{x,j} \right) = 0
$$$$
\delta p_{x,i} = -\epsilon \frac{\partial L_z}{\partial x_i} = -\epsilon \frac{\partial}{\partial x_i} \left( \sum_{j=1}^N x_j p_{y,j} – y_j p_{x,j} \right) = -\epsilon p_{y,i}
$$$$
\delta p_{y,i} = -\epsilon \frac{\partial L_z}{\partial y_i} = -\epsilon \frac{\partial}{\partial y_i} \left( \sum_{j=1}^N x_j p_{y,j} – y_j p_{x,j} \right) = \epsilon p_{x,i}
$$$$
\delta p_{z,i} = -\epsilon \frac{\partial L_z}{\partial z_i} = -\epsilon \frac{\partial}{\partial z_i} \left( \sum_{j=1}^N x_j p_{y,j} – y_j p_{x,j} \right) = 0
$$のように変化する。これを行列形式で表現すると、微小量\(\epsilon\)に関する1次近似\(\cos\epsilon \approx 1, \sin\epsilon \approx \epsilon\)を用いて、
$$
\begin{pmatrix} x_i+\delta x_i \\ y_i+\delta y_i \\ z_i+ \delta z_i \end{pmatrix} = \begin{pmatrix} 1 & -\epsilon & 0 \\ \epsilon & 1 & 0 \\ 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} x_i \\ y_i \\ z_i \end{pmatrix} \approx \begin{pmatrix} \cos\epsilon & -\sin\epsilon & 0 \\ \sin\epsilon & \cos\epsilon & 0 \\ 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} x_i \\ y_i \\ z_i \end{pmatrix}
$$$$
\begin{pmatrix} p_{x,i}+ \delta p_{x,i} \\ p_{y,i}+ \delta p_{y,i} \\ p_{z,i}+ \delta p_{z,i} \end{pmatrix} = \begin{pmatrix} 1 & -\epsilon & 0 \\ \epsilon & 1 & 0 \\ 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} p_{x,i} \\ p_{y,i} \\ p_{z,i} \end{pmatrix} \approx \begin{pmatrix} \cos\epsilon & -\sin\epsilon & 0 \\ \sin\epsilon & \cos\epsilon & 0 \\ 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} p_{x,i} \\ p_{y,i} \\ p_{z,i} \end{pmatrix}
$$となっているが、これは各粒子の座標と運動量のベクトルがともに、\(z\)方向を軸として微小角 \(\epsilon\)だけ回転することを意味する。つまり、\(L_z\)を生成子とする無限小変換は\(z\)方向を軸とした微小角回転移動そのものである。このため、角運動量は空間回転の生成子ともよばれる。
例3.21(ハミルトニアン\(H\)を生成子とする無限小変換)
この変換で、座標\(q_i\)と運動量\(p_i\)はそれぞれ
$$
\delta q_i = \epsilon \frac{\partial H}{\partial p_i} \qquad \delta p_i = -\epsilon \frac{\partial H}{\partial q_i}
$$のように変化するが、これはハミルトンの正準方程式にしたがう変化ですから、微小時間\(\epsilon=\delta t\)に対して、
$$
\delta q_i = \frac{d q_i}{dt} \delta t \qquad \delta p_i = \frac{d p_i}{dt} \delta t
$$とかける。つまり、ハミルトニアン\(H\)を生成子とする無限小変換は微小時間発展による移動そのものである。このため、ハミルトニアンは時間発展の生成子ともよばれる。
さてこれくらいやれば、「物理量を生成子とする無限小変換」のイメージはできたでしょうか。ここで、次の定理が成り立ちます。
系3.22
物理量\(B(\boldsymbol{q}, \boldsymbol{p}, t)\)を生成子とする無限小変換が、定義3.18にしたがって定義されるとすると、この変換による、任意の物理量\(A(\boldsymbol{q}, \boldsymbol{p},t)\)の変化量\(\delta A\)は、\(\delta A= \epsilon \{A, B\}\)とかける。
系3.22の証明
物理量\(A(\boldsymbol{q}, \boldsymbol{p},t)\)の変化量\(\delta A\)を計算すると、以下のように示される。
\begin{align*}
\delta A &= A(\boldsymbol{q} + \delta\boldsymbol{q}, \boldsymbol{p} + \delta\boldsymbol{p},t) – A(\boldsymbol{q}, \boldsymbol{p},t) = \sum_i \left( \frac{\partial A}{\partial q_i} \delta q_i + \frac{\partial A}{\partial p_i} \delta p_i \right) \\
&= \sum_i \left( \frac{\partial A}{\partial q_i} \left( \epsilon \frac{\partial B}{\partial p_i} \right) + \frac{\partial A}{\partial p_i} \left( -\epsilon \frac{\partial B}{\partial q_i} \right) \right) = \epsilon \sum_i \left( \frac{\partial A}{\partial q_i} \frac{\partial B}{\partial p_i} – \frac{\partial A}{\partial p_i} \frac{\partial B}{\partial q_i} \right) = \epsilon \{A, B\}
\end{align*}ただし、2つめの等号は多変数関数のテイラー展開の1次近似、3つ目の等号は定義3.18、5つ目の等号はポアソン括弧の定義を用いている。□
これがポアソン括弧の解釈として紹介したものの1つ目
- ポアソン括弧は、ある物理量\(B\)を生成子とする無限小変換によって、物理量\(A\)はどう変化するかを表す。
です。ポアソン括弧で計算される量\(\{A, B\}\)は、\(B\)を生成子とする無限小変換に対する、\(A\)という量の変化の割合そのものを表しています。
■ポアソン括弧の物理的性質②―保存量の判定
まず、次の定理が成り立ちます。
定理3.23
時間\(t\)に直接依存しない任意の物理量\(A(\boldsymbol{q}, \boldsymbol{p})\)に対して、微小の時間発展\(\delta t\)における物理量\(A\)の変化量は\(\delta A= \delta t \{A, H\}\)とかける。
定理3.23の証明
定義3.18にしたがって、座標\(q_i\)と運動量\(p_i\)を
$$
\delta q_i = \epsilon \frac{\partial H}{\partial p_i} = \frac{d q_i}{dt} \epsilon \qquad \delta p_i = -\epsilon \frac{\partial H}{\partial q_i} = \frac{d p_i}{dt} \epsilon
$$のように変化させる変換を、ハミルトニアン\(H(\boldsymbol{q}, \boldsymbol{p}, t)\)を生成子とする無限小変換と定義すると、これは先にも述べたように、座標\(q_i\)と運動量\(p_i\)を微小時間\(\epsilon\)だけ時間発展させる変換である。したがって、物理量\(A\)が時間\(t\)に直接依存しないならば、この変換によって、物理量\(A(\boldsymbol{q}, \boldsymbol{p})\)も微小時間\(\epsilon\)だけ時間発展する。
一方で、系3.22の結果より、この変換による物理量\(A(\boldsymbol{q}, \boldsymbol{p})\)の変化量\(\delta A\)は、\(\delta A= \epsilon \{A, H\}\)とかけるので、示された。□
ちなみに、この定理自体は系3.16からも明らかなのですが、ここでは「物理量を生成子とする無限小変換」のイメージを育みたかったため、この証明方法にしました。
このことから、直ちに次のことがいえます。
系3.24
時間\(t\)に直接依存しない任意の物理量\(A(\boldsymbol{q}, \boldsymbol{p})\)に対して、\(\{A, H\} = 0\)ならば物理量\(A(\boldsymbol{q}, \boldsymbol{p})\)は時間変化に対して保存する。
これがポアソン括弧の解釈として紹介したものの2つ目
- ポアソン括弧は、物理量\(A\)が時間発展に対して保存するかを判定する。
に非常に深く関係します。というのは、ハミルトニアンとのポアソン括弧をとった結果がゼロであるか否かによって、物理量が保存するか否かを判定できるというわけですからね。
ところでこの結果について、どこかネーターの定理に似ている気がしませんか。実はラグランジュ力学で扱ったネーターの定理と、いまみた定理3.24はまったく同じことを言っています。確認してみましょう。
次の定理3.25は、ラグランジュ力学で扱ったネーターの定理をハミルトン力学にもってきたものです。
定理3.25(ネーターの定理)
次の(Ⅰ)と(Ⅱ)は同値である。
(Ⅰ) 時間\(t\)に直接依存しない任意の物理量\(G(\boldsymbol{q}, \boldsymbol{p})\)を生成子とする無限小変換が、定義2.1にしたがって定義されるとすると、この変換によるハミルトニアン\(H(\boldsymbol{q}, \boldsymbol{p},t)\)が不変である。
(Ⅱ) 時間\(t\)に直接依存しない任意の物理量\(G(\boldsymbol{q}, \boldsymbol{p})\)が、時間変化に対して保存される。
ラグランジュ力学で扱ったネーターの定理をハミルトン力学にもってくると、定理3.25になる証明
ラグランジュ力学で扱ったネーターの定理によると、ある変換によるラグランジアン\(L\)の変分\(\delta L\)が、ある関数\(J\)の全微分\(dJ/dt\)でかけるならば、物理量
$$
\left( \sum_{i=1}^N \frac{\partial L}{\partial \dot{q}_i} \delta q_i \right) – J = \sum_{i=1}^N p_i \delta q_i – J
$$は保存する。この保存量が微小パラメータ\(\epsilon\)を用いて\(\epsilon G\)とかけるとして、これと正準方程式のみを前提にした議論で定理3.25が証明できることを示す。まずハミルトニアン\(H\)の変分\(\delta H\)は、
\begin{align*}
\delta H &= \sum_{i=1}^N (\delta p_i \dot{q}_i + p_i \delta \dot{q}_i) – \delta L = \frac{d}{dt} \left( \sum_{i=1}^N p_i \delta q_i \right) + \sum_{i=1}^N (\dot{q}_i \delta p_i – \dot{p}_i \delta q_i) – \delta L \\
&= \frac{d}{dt} \left( \sum_{i=1}^N p_i \delta q_i – J \right) + \sum_{i=1}^N (\dot{q}_i \delta p_i – \dot{p}_i \delta q_i) = \epsilon \frac{dG}{dt} + \sum_{i=1}^N (\dot{q}_i \delta p_i – \dot{p}_i \delta q_i)
\end{align*}とかける。ただし、1番目の等号はハミルトニアンの定義\(H = \sum_{i=1}^N p_i \dot{q}_i – L\)、2番目の等号は積の微分\( \frac{d}{dt}(p_i \delta q_i)=p_i \delta \dot{q}_i +\dot{p}_i \delta q_i \)、3番目の等号は\(\delta L\)がある関数\(J\)の全微分\(dJ/dt\)でかけること、4番目の等号は保存量が微小パラメータ\(\epsilon\)を用いて\(\epsilon G\)とかけることを用いた。
これより、座標と運動量の変分が、物理量\(G(\boldsymbol{q}, \boldsymbol{p})\)を生成子とする無限小変換にしたがう、つまり、
$$
\delta q_i = \epsilon \frac{\partial G}{\partial p_i} \qquad \delta p_i = -\epsilon \frac{\partial G}{\partial q_i}
$$を満たしているとき、
$$
\epsilon \frac{dG}{dt} = \epsilon \sum_{i=1}^N \left( \frac{\partial G}{\partial q_i} \dot{q}_i + \frac{\partial G}{\partial p_i} \dot{p}_i \right) = \sum_{i=1}^N \left( \frac{\partial G}{\partial q_i} \frac{\partial H}{\partial p_i} – \frac{\partial G}{\partial p_i} \frac{\partial H}{\partial q_i} \right) = -\sum_{i=1}^N \left( \frac{\partial H}{\partial q_i} \delta q_i + \frac{\partial H}{\partial p_i} \delta p_i \right) = -\delta H
$$となるといえる。ただし、2つ目の等号はハミルトンの正準方程式、3つ目の等号は物理量\(G(\boldsymbol{q}, \boldsymbol{p})\)を生成子とする無限小変換の定義を用いた。
ここから、ハミルトニアン\(H(\boldsymbol{q}, \boldsymbol{p},t)\)が変換に対して不変であること、つまり\(\delta H=0\)と、物理量\(G(\boldsymbol{q}, \boldsymbol{p})\)が時間変化に対して保存されること、つまり\(dG/dt=0\)は同値であるから示された。□
この定理3.25はこれとは別に、ポアソン括弧を使うと次のように、まさに一発で証明できます。これを見ると、ポアソン括弧はネーターの定理とも繋がっていることがよく確認できますね。
定理3.25の証明
(Ⅰ)の命題「物理量\(G(\boldsymbol{q}, \boldsymbol{p})\)を生成子とする無限小変換に対してハミルトニアンが不変である」は、系2.2より、その変分\(\delta H = \epsilon \{H, G\}\)がゼロである、すなわち\(\{H, G\} = 0\)であると表せる。
また、(Ⅱ)の命題「物理量\(G(\boldsymbol{q}, \boldsymbol{p})\)が保存される」は、定理2.4より、\(\{G, H\} = 0\)であると表せる。
ここで定理1.3より、ポアソン括弧は反対称性\(\{H, G\} = -\{G, H\}\)を満たすので、\(\{H, G\} = 0\)と\(\{G, H\} = 0\)は同値であるとして示された。□
■ポアソン括弧の物理的性質➂―変換の独立性の判定
まず、次の定理が成り立ちます。
定理3.26
物理量\(A(\boldsymbol{q}, \boldsymbol{p}, t), B(\boldsymbol{q}, \boldsymbol{p}, t)\)を生成子とする無限小変換が、定義3.18にしたがってそれぞれ定義されるとすると、次の(Ⅰ)と(Ⅱ)は同値である。
(Ⅰ) \(\{A, B\} = 0\)である。
(Ⅱ) 2つの物理量\(A(\boldsymbol{q}, \boldsymbol{p}, t), B(\boldsymbol{q}, \boldsymbol{p}, t)\)を生成子とする無限小変換が独立していて干渉しない、つまり、任意の物理量\(F\)に対してこれら2つの変換を連続して作用させたときに、その作用させる順序に結果が一切依存しない。
定理3.26の証明
任意の物理量\(F\)に対して、\(A(\boldsymbol{q}, \boldsymbol{p}, t), B(\boldsymbol{q}, \boldsymbol{p}, t)\)の順に、それぞれを生成子とする無限小変換を作用させたときの、\(F(\boldsymbol{q}, \boldsymbol{p},t)\)の変化量\(\delta F_1\)は\(\delta F_1= \epsilon_A\epsilon_B \{ \{F, A\},B \}\)とかける。同様に、\(B(\boldsymbol{q}, \boldsymbol{p}, t), A(\boldsymbol{q}, \boldsymbol{p}, t)\)の順に、それぞれを生成子とする無限小変換を作用させたときの、\(F(\boldsymbol{q}, \boldsymbol{p},t)\)の変化量\(\delta F_2\)は\(\delta F_2= \epsilon_A\epsilon_B \{ \{F, B\},A \}\)とかける。ここでもし、これら2つの変換を連続して作用させたときに、その作用させる順序に結果が一切依存しないならば、
$$
\delta F_1-\delta F_2=\epsilon_A\epsilon_B \left( \{ \{F, A\},B \} – \{ \{F, B\},A \} \right)=\epsilon_A\epsilon_B \{F, \{A, B\}\}=0
$$とかける。ただし、2つ目の等号は、定理3.17(Ⅳ)のヤコビ恒等式を用いている。したがって、(Ⅱ)の条件は、任意の物理量\(F\)に対して\( \{F, \{A, B\}\}=0\)が成り立つこと、つまり、\(\{A, B\} = 0\)が成り立つことに等価であるから示された。□
これがポアソン括弧の解釈として紹介したものの3つ目
- ポアソン括弧は、物理量\(B\)を生成子とする変換と物理量\(A\)を生成子とする変換が独立しているかを判定する。
そのものです。変換が独立しているとは、定理3.26で述べたように、2つの変換を連続して作用させたときにその作用させる順序に結果が一切依存しないということです。
分かりやすい例を使ってイメージしましょう。
例3.27(2つの変換が独立している例)
\(x\)方向の運動量\(p_x\)を生成子とする無限小変換は\(x\)方向への微小な平行移動、\(y\)方向の運動量\(p_y\)を生成子とする無限小変換は\(y\)方向への微小な平行移動であって、
$$
\{p_x,p_y\}=\left( \frac{\partial p_x}{\partial x} \frac{\partial p_y}{\partial p_x} – \frac{\partial p_x}{\partial p_x} \frac{\partial p_y}{\partial x} \right) + \left( \frac{\partial p_x}{\partial y} \frac{\partial p_y}{\partial p_y} – \frac{\partial p_x}{\partial p_y} \frac{\partial p_y}{\partial y} \right) + \left( \frac{\partial p_x}{\partial z} \frac{\partial p_y}{\partial p_z} – \frac{\partial p_x}{\partial p_z} \frac{\partial p_y}{\partial z} \right) = 0
$$であることから、この2つの変換は独立している。
これは実際「右に1歩進んでから、前に1歩進む」のも、「前に1歩進んでから、右に1歩進む」のも、最終的な立ち位置は同じであることからも明らか。
例3.28(2つの変換が独立していない例)
\(x\)方向の角運動量\(L_x\)を生成子とする無限小変換は\(x\)方向を軸とした微小な回転移動、\(y\)方向の角運動量\(L_y\)を生成子とする無限小変換は\(y\)方向を軸とした微小な回転移動であって、\(L_x = y p_z – z p_y,L_y = z p_x – x p_z\)より、
\begin{align*}
\{L_x,L_y\}&=\left( \frac{\partial L_x}{\partial x} \frac{\partial L_y}{\partial p_x} – \frac{\partial L_x}{\partial p_x} \frac{\partial L_y}{\partial x} \right) + \left( \frac{\partial L_x}{\partial y} \frac{\partial L_y}{\partial p_y} – \frac{\partial L_x}{\partial p_y} \frac{\partial L_y}{\partial y} \right) + \left( \frac{\partial L_x}{\partial z} \frac{\partial L_y}{\partial p_z} – \frac{\partial L_x}{\partial p_z} \frac{\partial L_y}{\partial z} \right)\\[1.5px]
&= x p_y – y p_x = L_z \ne0
\end{align*}であることから、この2つの変換は独立していない。
実際にスマホを持って試してみると、画面を上にした状態から\(x\)軸周りに90度回転させて\(y\)軸周りに90度回転させる結果と、その順番を逆にした結果では、スマホの向きは全く異なっていることが確認できることからも明らか。
ところで、\(\{L_x,L_y\}=L_z\)となっていることをふまえると、直感的に次の定理が正しいのではないか、と思えてきませんか。実際に確かめてみましょう。
定理3.29
物理量\(A(\boldsymbol{q}, \boldsymbol{p}, t), B(\boldsymbol{q}, \boldsymbol{p}, t)\)を生成子とする無限小変換が、定義3.18にしたがってそれぞれ定義されるとする。
ここで、任意の物理量\(F\)に対してこれら2つの変換を連続して作用させたときに、その作用させる順序によって生じる結果のズレを埋めるための変換は、ポアソン括弧\(\{A, B\}\)を生成子とする無限小変換である。
定理3.29の証明
任意の物理量\(F\)に対して、\(A(\boldsymbol{q}, \boldsymbol{p}, t), B(\boldsymbol{q}, \boldsymbol{p}, t)\)の順に、それぞれを生成子とする無限小変換を作用させたときの、\(F(\boldsymbol{q}, \boldsymbol{p},t)\)の変化量を\(\delta F_1\)、この逆の順に作用させたときの、\(F(\boldsymbol{q}, \boldsymbol{p},t)\)の変化量を\(\delta F_2\)とすると、定理3.26の証明と同様にして、
$$
\delta F_1-\delta F_2=\epsilon_A\epsilon_B \left( \{ \{F, A\},B \} – \{ \{F, B\},A \} \right)=\epsilon_A\epsilon_B \{F, \{A, B\}\}
$$とかける。ここで、\(\epsilon_A\epsilon_B \{F, \{A, B\}\}\)は、物理量\(\{A, B\}\)を生成子とする無限小変換を作用させたときの\(F(\boldsymbol{q}, \boldsymbol{p},t)\)の変化量にほかならないので、示された。□
■ポアソン括弧の物理的性質④―正準変換かどうかの判定
さて、最後にポアソン括弧の解釈として紹介したものの4つ目
- ポアソン括弧は、ある変換\((\boldsymbol{q}, \boldsymbol{p}) \rightarrow (\boldsymbol{Q}, \boldsymbol{P})\)が正準変換であるかを判定する。
ですが、これは正準変換についての知識が必要なので、次の節の後半で説明します。
7 正準変換
ラグランジュ形式でもハミルトン形式でも、位置を表す座標\(\boldsymbol{q}\)の間の変換\(\boldsymbol{q} \rightarrow \boldsymbol{Q}(\boldsymbol{q})\)に対して、方程式が変わらないことはさんざん扱ってきました。
ところで、ラグランジュ形式からハミルトン形式に移る過程で、大きく変わったこととして、”位置座標\(\boldsymbol{q}\)と運動量座標\(\boldsymbol{p}\)が完全に対等な独立変数になったこと”がありましたよね。そうすると、この対等性を利用して「\(\boldsymbol{q}\)と\(\boldsymbol{p}\)をぐちゃぐちゃに混ぜ合わせて、計算が楽になるような、全く新しい架空の位置\(\boldsymbol{Q}\)と運動量\(\boldsymbol{P}\)を作り出す変換」をしたいと思いませんか。
つまり、運動量を表す座標\(\boldsymbol{p}\)を含めた座標変換\((\boldsymbol{q}, \boldsymbol{p}) \rightarrow \Big(\boldsymbol{Q}(\boldsymbol{q}, \boldsymbol{p},t), \boldsymbol{P}(\boldsymbol{q}, \boldsymbol{p},t) \Big)\)を考えませんか、ということです。
ただ、この変換で正準方程式が使えなくなったら元も子もありません。そこで、正準形式が保たれる変換、つまり、
もとの変数\((\boldsymbol{q}, \boldsymbol{p})\)から新しい変数\((\boldsymbol{Q}, \boldsymbol{P})\)への座標変換であって、\(i=1,2,…,N\)に対して正準方程式
$$
\dot{Q}_i = \frac{\partial K}{\partial P_i}, \qquad \dot{P}_i = -\frac{\partial K}{\partial Q_i}
$$を成り立たせるような新しいハミルトニアン\(K(\boldsymbol{Q}, \boldsymbol{P}, t)\)が存在する座標変換
とはどういう座標変換なのか、というのがこの節のモチベーションです。
■結局どういう変換をしたいのか
とはいえ「\(\boldsymbol{q}\)と\(\boldsymbol{p}\)をぐちゃぐちゃに混ぜ合わせて、計算が楽になるような、全く新しい架空の位置\(\boldsymbol{Q}\)と運動量\(\boldsymbol{P}\)を作り出す変換」をしたいというところが、まだ自然に思えないかもしれません。
そもそもまず、計算が楽になるような、新しい架空の位置\(\boldsymbol{Q}\)と運動量\(\boldsymbol{P}\)とはいったいどんなものでしょうか。その答えの一つには、
ハミルトニアンの表式の中に直接含まれていない変数を、位置\(Q_i\)や運動量\(P_i\)として選ぶ変換
があります。例えば、新しいハミルトニアン\(K\)が直接の変数として位置座標\(Q_i\)を含まなければ、\(\dot{P}_i = -\frac{\partial K}{\partial Q_i} = 0\)となるので、架空の運動量\(P_i\)は保存される「定数」となりますよね。
一つ具体的な例を見てみましょう。
質量が\(m=1\)、バネ定数が\(k=1\)であるような1次元調和振動子を考えて、この変位を\(q\)、対応する運動量を\(p\)とすると、ハミルトニアン\(H(q,p)\)は、
$$
H(q, p) = \frac{1}{2}p^2 + \frac{1}{2}q^2
$$とかけます。これを単純に正準方程式から解いてもいいのですが、その結果はご存じのように、位置座標\(q\)、運動量座標\(p\)ともに変化し続ける面倒な変数になります。
ところが、次のような変数変換を考えてみるとどうでしょう。
$$
q = \sqrt{2P} \sin Q \qquad p = \sqrt{2P} \cos Q
$$まだくわしい証明はしませんが、これは正しい正準変換であって、これに対応するハミルトニアンは\(K(Q, P) = P\)ですから、正準方程式として、
$$
\dot{P} = -\frac{\partial K}{\partial Q} = 0 \qquad \dot{Q} = \frac{\partial K}{\partial P} = 1
$$となります。新しい運動量座標\(P\)は定数、新しい位置座標\(Q\)は一定の速度で増加する単調増加の変数となり、微分方程式を解かなくてよいという点でずいぶん扱うのが簡単になったと思いませんか。
もっと複雑な問題になったときに、こういう変換ができるかできないかで、解く手間や問題の見方が大きく変わったりするので、正準変換はハミルトン力学を学ぶ上で大事な技術となっています。
■正準変換の条件
ここまで述べたことをまとめて、以下を正準変換の定義とします。
定義3.30(正準変換の定義)
変数\((\boldsymbol{q}, \boldsymbol{p})\)から変数\(\Big(\boldsymbol{Q}(\boldsymbol{q}, \boldsymbol{p},t), \boldsymbol{P}(\boldsymbol{q}, \boldsymbol{p},t) \Big)\)への座標変換であって、\(i=1,2,…,N\)に対して正準方程式
$$
\dot{Q}_i = \frac{\partial K}{\partial P_i}, \qquad \dot{P}_i = -\frac{\partial K}{\partial Q_i}
$$を成り立たせるような新しいハミルトニアン\(K(\boldsymbol{Q}, \boldsymbol{P}, t)\)が存在する座標変換を、正準変換と定義する。
このとき、以下が成り立ちます。
定理3.31
次の(Ⅰ)と(Ⅱ)は同値である。
(Ⅰ) 座標変換\((\boldsymbol{q}, \boldsymbol{p}) \rightarrow \Big(\boldsymbol{Q}(\boldsymbol{q}, \boldsymbol{p},t), \boldsymbol{P}(\boldsymbol{q}, \boldsymbol{p},t) \Big)\)は正準変換である。
(Ⅱ) \(i=1,2,…,N\)に対して、\(\sum_{i=1}^N p_i dq_i – Hdt = \sum_{i=1}^N P_i dQ_i – Kdt + dF\)を満たす関数\(F,K\)が存在する。
定理3.31の(Ⅰ)→(Ⅱ)の証明
変換\((\boldsymbol{q}, \boldsymbol{p}) \rightarrow \Big(\boldsymbol{Q}(\boldsymbol{q}, \boldsymbol{p},t), \boldsymbol{P}(\boldsymbol{q}, \boldsymbol{p},t) \Big)\)が正準変換であるならば、その定義より\(i=1,2,…,N\)に対して、
$$
\delta \int_{t_1}^{t_2} \left( \sum_{i=1}^N p_i \dot{q}_i – H \right) dt = 0 \qquad \delta \int_{t_1}^{t_2} \left( \sum_{i=1}^N P_i \dot{Q}_i – K \right) dt = 0
$$が成り立つ。変分をとってゼロになる関数どうしというのは完全に同じ関数である必要はなく、任意の関数\(F\)の時間による全微分\(\frac{dF}{dt}\)だけのずれが許容されるので、\(i=1,2,…,N\)に対して、
$$
\sum_{i=1}^N p_i \dot{q}_i – H = \sum_{i=1}^N P_i \dot{Q}_i – K + \frac{dF}{dt}
$$すなわち、\(\sum_{i=1}^N p_i dq_i – Hdt = \sum_{i=1}^N P_i dQ_i – Kdt + dF\)を満たす関数\(F,K\)が存在することが示された。□
定理3.31の(Ⅱ)→(Ⅰ)の証明
前提として、現実の運動は最小作用の原理を満足するので作用積分の変分はゼロ、つまり、
$$
\delta S = \delta \int L dt = \delta \int_{t_1}^{t_2} \left( \sum_{i=1}^N p_i \dot{q}_i – H \right) dt = 0 \qquad \text{(a)}
$$となるが、この変分計算からハミルトンの正準方程式を得ることができることを後で用いる。
さて、(Ⅱ)の式の両辺を微小時間\(dt\)で割ると、
$$
\sum_{i=1}^N p_i \dot{q}_i – H = \sum_{i=1}^N P_i \dot{Q}_i – K + \frac{dF}{dt}
$$となり、この式の両辺を、時間\(t_1\)から\(t_2\)まで積分すると、
$$
\int_{t_1}^{t_2} \left( \sum_{i=1}^N p_i \dot{q}_i – H \right) dt = \int_{t_1}^{t_2} \left( \sum_{i=1}^N P_i \dot{Q}_i – K \right) dt + \int_{t_1}^{t_2} \frac{dF}{dt} dt = \int_{t_1}^{t_2} \left( \sum_{i=1}^N P_i \dot{Q}_i – K \right) dt + F(t_2) – F(t_1)
$$とかける。さらに、この式の両辺の、始点\(t_1\)と終点\(t_2\)を固定したときの変分をとると、
$$
0 = \delta \int_{t_1}^{t_2} \left( \sum_{i=1}^N p_i \dot{q}_i – H \right) dt = \delta \int_{t_1}^{t_2} \left( \sum_{i=1}^N P_i \dot{Q}_i – K \right) dt
$$となる。ただし1つめの等号は式(a)を、2つ目の等号は\(\delta F(t_2) = \delta F(t_1) = 0\)を用いた。ここで得られた
$$
0 = \delta \int_{t_1}^{t_2} \left( \sum_{i=1}^N P_i \dot{Q}_i – K \right) dt
$$について、この変分計算から新しい変数\((\boldsymbol{Q}, \boldsymbol{P})\)とハミルトニアン\(K\)におけるハミルトンの正準方程式
$$
\dot{Q}_i = \frac{\partial K}{\partial P_i}, \qquad \dot{P}_i = -\frac{\partial K}{\partial Q_i} \qquad (i=1,2,…,N)
$$を得ることができるので、示された。□
■母関数
ではここからは、実際の正準変換をパターン化していきましょう。
その前に、正準変換をしたときに、独立な文字と従属な文字について注目してみます。
例えば、恒等変換\(\boldsymbol{Q}=\boldsymbol{q},\quad \boldsymbol{P}=\boldsymbol{p}\)みたいに、新しい位置座標\(\boldsymbol{Q}\)がもとの運動量座標\(\boldsymbol{p}\)に全く依存していないとき、\(\boldsymbol{q}\)と\(\boldsymbol{Q}\)は従属であって、\(\boldsymbol{p}\)と\(\boldsymbol{Q}\)は独立ですよね。
こういうふうにみていくと、どんな正準変換\((\boldsymbol{q}, \boldsymbol{p}) \rightarrow \Big(\boldsymbol{Q}(\boldsymbol{q}, \boldsymbol{p},t), \boldsymbol{P}(\boldsymbol{q}, \boldsymbol{p},t) \Big)\)も、
- (Ⅰ) \(\boldsymbol{q}\)と\(\boldsymbol{Q}\)が独立な正準変換
- (Ⅱ) \(\boldsymbol{q}\)と\(\boldsymbol{P}\)が独立な正準変換
- (Ⅲ) \(\boldsymbol{p}\)と\(\boldsymbol{Q}\)が独立な正準変換
- (Ⅳ) \(\boldsymbol{p}\)と\(\boldsymbol{P}\)が独立な正準変換
のうち、少なくとも2つにはあてはまるわけです。ちなみに、先ほど少し見た例で行った正準変換は、
$$
q = \sqrt{2P} \sin Q \qquad p = \sqrt{2P} \cos Q
$$というものでしたが、これは(Ⅰ)(Ⅱ)(Ⅲ)(Ⅳ)のすべてにあてはまっていますし、先ほどみた恒等変換は(Ⅱ)と(Ⅲ)にあてはまっていますね。
ここからは、正準変換を以上の4パターンに分けて見ていくことになります。まずは、\(\boldsymbol{q}\)と\(\boldsymbol{Q}\)が独立な正準変換についてです。
定理3.32
次の(Ⅰ)と(Ⅱ)は同値である。
(Ⅰ) 座標変換\((\boldsymbol{q}, \boldsymbol{p}) \rightarrow \Big(\boldsymbol{Q}(\boldsymbol{q}, \boldsymbol{p},t), \boldsymbol{P}(\boldsymbol{q}, \boldsymbol{p},t) \Big)\)は、ハミルトニアンを\(H(\boldsymbol{q}, \boldsymbol{p}, t)\)から\(K(\boldsymbol{Q}, \boldsymbol{P}, t)\)に移す正準変換であって、\(\boldsymbol{q}\)と\(\boldsymbol{Q}\)は独立である。
(Ⅱ) \(i=1,2,…,N\)に対して、次を満たす関数\(W(\boldsymbol{q},\boldsymbol{Q},t)\)が存在する。
$$
p_i= \frac{\partial W}{\partial q_i} \qquad P_i= -\frac{\partial W}{\partial Q_i} \qquad K = H + \frac{\partial W}{\partial t}
$$
定理3.32の(Ⅰ)→(Ⅱ)の証明
(Ⅰ)の仮定よりこの変換は正準変換であるので、定理3.31より、
$$
\sum_{i=1}^N p_i dq_i – H dt = \sum_{i=1}^N P_i dQ_i – K dt + dF
$$を満たす関数\(F\)が必ず存在する。これを移項すると、
$$
dF = \sum_{i=1}^N p_i dq_i – \sum_{i=1}^N P_i dQ_i + (K – H) dt \qquad \text{(a)}
$$となる。一方で、\(\boldsymbol{q}\)と\(\boldsymbol{Q}\)は独立であるから、\(F\)の引数として\((\boldsymbol{q}, \boldsymbol{Q}, t)\)の組を選ぶことができるので、数学的に関数\(F(\boldsymbol{q}, \boldsymbol{Q}, t)\)の全微分\(dF\)は
$$
dF = \sum_{i=1}^N \frac{\partial F}{\partial q_i} dq_i + \sum_{i=1}^N \frac{\partial F}{\partial Q_i} dQ_i + \frac{\partial F}{\partial t} dt \qquad \text{(b)}
$$とかける。(a)式と(b)式の係数を比較することで、
$$
p_i= \frac{\partial F}{\partial q_i} \qquad P_i= -\frac{\partial F}{\partial Q_i} \qquad K = H + \frac{\partial F}{\partial t}
$$となるから、\(W=F\)として示された。□
定理3.32の(Ⅱ)→(Ⅰ)の証明
(Ⅱ)の仮定において、関数\(W\)が\(\boldsymbol{q}\)と\(\boldsymbol{Q}\)と\(t\)を変数に持っており、偏微分\(\partial W/\partial q_i\)や\(\partial W/\partial Q_i\)がそれぞれ意味を持って定義されていることから、変数\(\boldsymbol{q}\)と\(\boldsymbol{Q}\)は互いに独立に動かせる変数である。よって、関数\(W(\boldsymbol{q}, \boldsymbol{Q}, t)\)の全微分は、
$$
dW = \sum_{i=1}^N \frac{\partial W}{\partial q_i} dq_i + \sum_{i=1}^N \frac{\partial W}{\partial Q_i} dQ_i + \frac{\partial W}{\partial t} dt = \sum_{i=1}^N p_i dq_i – \sum_{i=1}^N P_i dQ_i + (K-H) dt
$$とかける。ただし、2つめの等号は(Ⅱ)の仮定を用いた。この式を移項すると、
$$
\sum_{i=1}^N p_i dq_i – H dt = \sum_{i=1}^N P_i dQ_i – K dt + dW
$$とかけるから、定理3.31の\(F\)を\(W\)としたものとして、示された。□
次に、\(\boldsymbol{q}\)と\(\boldsymbol{P}\)が独立な正準変換についてです。
定理3.33
次の(Ⅰ)と(Ⅱ)は同値である。
(Ⅰ) 座標変換\((\boldsymbol{q}, \boldsymbol{p}) \rightarrow \Big(\boldsymbol{Q}(\boldsymbol{q}, \boldsymbol{p},t), \boldsymbol{P}(\boldsymbol{q}, \boldsymbol{p},t) \Big)\)は、ハミルトニアンを\(H(\boldsymbol{q}, \boldsymbol{p}, t)\)から\(K(\boldsymbol{Q}, \boldsymbol{P}, t)\)に移す正準変換であって、\(\boldsymbol{q}\)と\(\boldsymbol{P}\)は独立である。
(Ⅱ) \(i=1,2,…,N\)に対して、次を満たす関数\(W(\boldsymbol{q},\boldsymbol{P},t)\)が存在する。
$$
p_i= \frac{\partial W}{\partial q_i} \qquad Q_i= \frac{\partial W}{\partial P_i} \qquad K = H + \frac{\partial W}{\partial t}
$$
定理3.33の(Ⅰ)→(Ⅱ)の証明
(Ⅰ)の仮定よりこの変換は正準変換であるので、定理3.31より、
$$
\sum_{i=1}^N p_i dq_i – H dt = \sum_{i=1}^N P_i dQ_i – K dt + dF
$$を満たす関数\(F\)が必ず存在する。これを移項すると、
$$
dF = \sum_{i=1}^N p_i dq_i – \sum_{i=1}^N P_i dQ_i + (K – H) dt
$$となるから、新たに関数\(G=F-\sum_{i=1}^N P_iQ_i\)を定義すると、
$$
dG = \sum_{i=1}^N p_i dq_i + \sum_{i=1}^N Q_i dP_i + (K – H) dt \qquad \text{(a)}
$$となる。一方で、\(\boldsymbol{q}\)と\(\boldsymbol{P}\)は独立であるから、\(G\)の引数として\((\boldsymbol{q}, \boldsymbol{P}, t)\)の組を選ぶことができるので、数学的に関数\(G(\boldsymbol{q}, \boldsymbol{P}, t)\)の全微分\(dG\)は
$$
dG = \sum_{i=1}^N \frac{\partial G}{\partial q_i} dq_i + \sum_{i=1}^N \frac{\partial G}{\partial P_i} dP_i + \frac{\partial G}{\partial t} dt \qquad \text{(b)}
$$とかける。(a)式と(b)式の係数を比較することで、
$$
p_i= \frac{\partial G}{\partial q_i} \qquad Q_i= \frac{\partial G}{\partial P_i} \qquad K = H + \frac{\partial G}{\partial t}
$$となるから、\(W=G\)として示された。□
定理3.33の(Ⅱ)→(Ⅰ)の証明
(Ⅱ)の仮定において、関数\(W\)が\(\boldsymbol{q}\)と\(\boldsymbol{P}\)と\(t\)を変数に持っており、偏微分\(\partial W/\partial q_i\)や\(\partial W/\partial P_i\)がそれぞれ意味を持って定義されていることから、変数\(\boldsymbol{q}\)と\(\boldsymbol{P}\)は互いに独立に動かせる変数である。よって、関数\(W(\boldsymbol{q}, \boldsymbol{P}, t)\)の全微分は、
$$
dW = \sum_{i=1}^N \frac{\partial W}{\partial q_i} dq_i + \sum_{i=1}^N \frac{\partial W}{\partial P_i} dP_i + \frac{\partial W}{\partial t} dt = \sum_{i=1}^N p_i dq_i + \sum_{i=1}^N Q_i dP_i + (K-H) dt
$$とかける。ただし、2つめの等号は(Ⅱ)の仮定を用いた。この式を整理して移項すると、
$$
\sum_{i=1}^N p_i dq_i – H dt = \sum_{i=1}^N P_i dQ_i – K dt + d\left( W – \sum_{i=1}^N P_i Q_i \right)
$$とかけるから、定理3.31の\(F\)を\(W – \sum_{i=1}^N P_i Q_i\)としたものとして、示された。□
続いて、\(\boldsymbol{p}\)と\(\boldsymbol{Q}\)が独立な正準変換についてです。
定理3.34
次の(Ⅰ)と(Ⅱ)は同値である。
(Ⅰ) 座標変換\((\boldsymbol{q}, \boldsymbol{p}) \rightarrow \Big(\boldsymbol{Q}(\boldsymbol{q}, \boldsymbol{p},t), \boldsymbol{P}(\boldsymbol{q}, \boldsymbol{p},t) \Big)\)は、ハミルトニアンを\(H(\boldsymbol{q}, \boldsymbol{p}, t)\)から\(K(\boldsymbol{Q}, \boldsymbol{P}, t)\)に移す正準変換であって、\(\boldsymbol{p}\)と\(\boldsymbol{Q}\)は独立である。
(Ⅱ) \(i=1,2,…,N\)に対して、次を満たす関数\(W(\boldsymbol{p},\boldsymbol{Q},t)\)が存在する。
$$
q_i= -\frac{\partial W}{\partial p_i} \qquad P_i= -\frac{\partial W}{\partial Q_i} \qquad K = H + \frac{\partial W}{\partial t}
$$
定理3.34の(Ⅰ)→(Ⅱ)の証明
(Ⅰ)の仮定よりこの変換は正準変換であるので、定理3.31より、
$$
\sum_{i=1}^N p_i dq_i – H dt = \sum_{i=1}^N P_i dQ_i – K dt + dF
$$を満たす関数\(F\)が必ず存在する。これを移項すると、
$$
dF = \sum_{i=1}^N p_i dq_i – \sum_{i=1}^N P_i dQ_i + (K – H) dt
$$となるから、新たに関数\(G=F-\sum_{i=1}^N p_iq_i\)を定義すると、
$$
dG = \sum_{i=1}^N -q_i dp_i – \sum_{i=1}^N P_i dQ_i + (K – H) dt \qquad \text{(a)}
$$となる。一方で、\(\boldsymbol{p}\)と\(\boldsymbol{Q}\)は独立であるから、\(G\)の引数として\((\boldsymbol{p}, \boldsymbol{Q}, t)\)の組を選ぶことができるので、数学的に関数\(G(\boldsymbol{p}, \boldsymbol{Q}, t)\)の全微分\(dG\)は
$$
dG = \sum_{i=1}^N \frac{\partial G}{\partial p_i} dp_i + \sum_{i=1}^N \frac{\partial G}{\partial Q_i} dQ_i + \frac{\partial G}{\partial t} dt \qquad \text{(b)}
$$とかける。(a)式と(b)式の係数を比較することで、
$$
q_i= -\frac{\partial G}{\partial p_i} \qquad P_i= -\frac{\partial G}{\partial Q_i} \qquad K = H + \frac{\partial G}{\partial t}
$$となるから、\(W=G\)として示された。□
定理3.34の(Ⅱ)→(Ⅰ)の証明
(Ⅱ)の仮定において、関数\(W\)が\(\boldsymbol{p}\)と\(\boldsymbol{Q}\)と\(t\)を変数に持っており、偏微分\(\partial W/\partial p_i\)や\(\partial W/\partial Q_i\)がそれぞれ意味を持って定義されていることから、変数\(\boldsymbol{p}\)と\(\boldsymbol{Q}\)は互いに独立に動かせる変数である。よって、関数\(W(\boldsymbol{p}, \boldsymbol{Q}, t)\)の全微分は、
$$
dW = \sum_{i=1}^N \frac{\partial W}{\partial p_i} dp_i + \sum_{i=1}^N \frac{\partial W}{\partial Q_i} dQ_i + \frac{\partial W}{\partial t} dt = \sum_{i=1}^N -q_i dp_i + \sum_{i=1}^N -P_i dQ_i + (K-H) dt
$$とかける。ただし、2つめの等号は(Ⅱ)の仮定を用いた。この式を整理して移項すると、
$$
\sum_{i=1}^N p_i dq_i – H dt = \sum_{i=1}^N P_i dQ_i – K dt + d\left( W – \sum_{i=1}^N p_i q_i \right)
$$とかけるから、定理3.31の\(F\)を\(W – \sum_{i=1}^N p_i q_i\)としたものとして、示された。□
最後に、\(\boldsymbol{p}\)と\(\boldsymbol{P}\)が独立な正準変換についてです。
定理3.35
次の(Ⅰ)と(Ⅱ)は同値である。
(Ⅰ) 座標変換\((\boldsymbol{q}, \boldsymbol{p}) \rightarrow \Big(\boldsymbol{Q}(\boldsymbol{q}, \boldsymbol{p},t), \boldsymbol{P}(\boldsymbol{q}, \boldsymbol{p},t) \Big)\)は、ハミルトニアンを\(H(\boldsymbol{q}, \boldsymbol{p}, t)\)から\(K(\boldsymbol{Q}, \boldsymbol{P}, t)\)に移す正準変換であって、\(\boldsymbol{p}\)と\(\boldsymbol{P}\)は独立である。
(Ⅱ) \(i=1,2,…,N\)に対して、次を満たす関数\(W(\boldsymbol{p},\boldsymbol{P},t)\)が存在する。
$$
q_i= -\frac{\partial W}{\partial p_i} \qquad Q_i= \frac{\partial W}{\partial P_i} \qquad K = H + \frac{\partial W}{\partial t}
$$
定理3.35の(Ⅰ)→(Ⅱ)の証明
(Ⅰ)の仮定よりこの変換は正準変換であるので、定理3.31より、
$$
\sum_{i=1}^N p_i dq_i – H dt = \sum_{i=1}^N P_i dQ_i – K dt + dF
$$を満たす関数\(F\)が必ず存在する。これを移項すると、
$$
dF = \sum_{i=1}^N p_i dq_i – \sum_{i=1}^N P_i dQ_i + (K – H) dt
$$となるから、新たに関数\(G=F-\sum_{i=1}^N P_iQ_i-\sum_{i=1}^N p_iq_i\)を定義すると、
$$
dG = \sum_{i=1}^N -q_i dp_i + \sum_{i=1}^N Q_i dP_i + (K – H) dt \qquad \text{(a)}
$$となる。一方で、\(\boldsymbol{p}\)と\(\boldsymbol{P}\)は独立であるから、\(G\)の引数として\((\boldsymbol{p}, \boldsymbol{P}, t)\)の組を選ぶことができるので、数学的に関数\(G(\boldsymbol{p}, \boldsymbol{P}, t)\)の全微分\(dG\)は
$$
dG = \sum_{i=1}^N \frac{\partial G}{\partial p_i} dp_i + \sum_{i=1}^N \frac{\partial G}{\partial P_i} dP_i + \frac{\partial G}{\partial t} dt \qquad \text{(b)}
$$とかける。(a)式と(b)式の係数を比較することで、
$$
q_i= -\frac{\partial G}{\partial p_i} \qquad Q_i= \frac{\partial G}{\partial P_i} \qquad K = H + \frac{\partial G}{\partial t}
$$となるから、\(W=G\)として示された。□
定理3.35の(Ⅱ)→(Ⅰ)の証明
(Ⅱ)の仮定において、関数\(W\)が\(\boldsymbol{p}\)と\(\boldsymbol{P}\)と\(t\)を変数に持っており、偏微分\(\partial W/\partial p_i\)や\(\partial W/\partial P_i\)がそれぞれ意味を持って定義されていることから、変数\(\boldsymbol{p}\)と\(\boldsymbol{P}\)は互いに独立に動かせる変数である。よって、関数\(W(\boldsymbol{p}, \boldsymbol{P}, t)\)の全微分は、
$$
dW = \sum_{i=1}^N \frac{\partial W}{\partial p_i} dp_i + \sum_{i=1}^N \frac{\partial W}{\partial P_i} dP_i + \frac{\partial W}{\partial t} dt = \sum_{i=1}^N -q_i dp_i + \sum_{i=1}^N Q_i dP_i + (K-H) dt
$$とかける。ただし、2つめの等号は(Ⅱ)の仮定を用いた。この式を整理して移項すると、
$$
\sum_{i=1}^N p_i dq_i – H dt = \sum_{i=1}^N P_i dQ_i – K dt + d\left( W -\sum_{i=1}^N P_iQ_i- \sum_{i=1}^N p_i q_i \right)
$$とかけるから、定理3.31の\(F\)を\(W -\sum_{i=1}^N P_iQ_i- \sum_{i=1}^N p_i q_i\)としたものとして、示された。□
以上が、具体的な正準変換の作り方です。これをもとに、実際に物理のどういうところで正準変換をどう使うのか、簡単な具体例を通して見ていきましょう。
■正準変換の適用例
では、先に述べた単振動の例をもう一度振り返って、正準変換の使い方を見ていきます。
例3.36
質量が\(m=1\)、バネ定数が\(k=1\)であるような1次元調和振動子を考えて、この変位を\(q\)、対応する運動量を\(p\)とすると、ハミルトニアン\(H(q,p)\)は、
$$
H(q, p) = \frac{1}{2}p^2 + \frac{1}{2}q^2
$$とかける。このハミルトニアンは時間非依存のため定数\(E\)であるから、この運動を横軸を\(q\)、縦軸を\(p\)とした位相空間上に描いてみると、半径が\(\sqrt{2E}\)の円になり、時間が経つにつれて位相空間上の状態\((q, p)\)はこの円周上をグルグルと回り続ける。よって、位相空間上の極座標で表せば、半径はずっと一定で、角度は単調に増えていくだけなので、これを新しい変数\(Q\)と\(P\)に変換する、つまり
$$
q = \sqrt{2P} \sin Q \qquad p = \sqrt{2P} \cos Q \qquad \text{(a)}
$$とすると、複雑な微分方程式を解かなくても解析できそうだと思い至るわけである。これが本当に正準変換として認められるためには、関数\(W\)の存在を示さなければならない。ここでは定理3.32を用いて、
$$
p= \frac{\partial W}{\partial q} \qquad P= -\frac{\partial W}{\partial Q} \qquad K = H + \frac{\partial W}{\partial t}
$$を満たす関数\(W(q,Q,t)\)が存在することを示してみよう。(a)式を\(p\)と\(P\)について解くと、
$$
P = \frac{q^2}{2 \sin^2 Q} \qquad p = \frac{q}{\tan Q} q
$$となるから、\(q\)で偏微分したら\(q/ \tan Q\)、\(Q\)で偏微分したら\(-q^2/2 \sin^2 Q\)になる関数として、
$$
W(q, Q) = \frac{q^2}{2 \tan Q}
$$がある。これに対応するハミルトニアンは定理3.32より、\(K(Q, P) =H + \partial W/\partial t = P\)とかけるから、正準方程式として、
$$
\dot{P} = -\frac{\partial K}{\partial Q} = 0 \qquad \dot{Q} = \frac{\partial K}{\partial P} = 1
$$が成り立ち、複雑な微分方程式を出さなくとも非常に簡単に解けてしまうわけである。
■シンプレクティック行列
正準変換であることと同値な条件をもう一つ伝えておきます。
定理3.37
次の(Ⅰ)と(Ⅱ)は同値である。
(Ⅰ) 座標変換\((\boldsymbol{q}, \boldsymbol{p}) \rightarrow \Big(\boldsymbol{Q}(\boldsymbol{q}, \boldsymbol{p},t), \boldsymbol{P}(\boldsymbol{q}, \boldsymbol{p},t) \Big)\)は正準変換である。
(Ⅱ) 古い変数から新しい変数への変換におけるヤコビ行列\(M\)および、\(N \times N\)の単位行列\(I\)と零行列\(O\)に対する\(2N \times 2N\)の反対称行列(シンプレティック行列)\(J\)を、次のように定義したとき、\(M J {}^t \! M^T = J\)
$$
M =\begin{pmatrix} \frac{\partial \boldsymbol{Q}_i}{\partial \boldsymbol{q}_j} & \frac{\partial \boldsymbol{Q}_i}{\partial \boldsymbol{p}_j} \\ \frac{\partial \boldsymbol{P}_i}{\partial \boldsymbol{q}_j} & \frac{\partial \boldsymbol{P}_i}{\partial \boldsymbol{p}_j} \end{pmatrix} \qquad J = \begin{pmatrix} 0 & I \\ -I & 0 \end{pmatrix}
$$
定理3.37の(Ⅰ)→(Ⅱ)の証明
\(2N\)個の古い変数\((\boldsymbol{q}, \boldsymbol{p})\)と、新しい変数\((\boldsymbol{Q}, \boldsymbol{P})\)を、それぞれ縦ベクトル\(\boldsymbol{x}\)と\(\boldsymbol{X}\)にまとめて
$$
\boldsymbol{x} = \begin{pmatrix} \boldsymbol{q} \\ \boldsymbol{p} \end{pmatrix}, \quad \boldsymbol{X} = \begin{pmatrix} \boldsymbol{Q} \\ \boldsymbol{P} \end{pmatrix}
$$とかくと、このとき古い変数におけるハミルトンの正準方程式\(\dot{q}_i = \frac{\partial H}{\partial p_i}, \dot{p}_i = -\frac{\partial H}{\partial q_i}\)は、
$$
\dot{\boldsymbol{x}} = J (\nabla_{\boldsymbol{x}} H) \qquad \text{(a)}
$$だけでかける。また、変換\(\boldsymbol{x} \rightarrow \boldsymbol{X}\)が正準変換であるとすると、新しい変数\(\boldsymbol{X}\)においても、新しいハミルトニアン\(K\)に対してハミルトンの正準方程式の形が保たれるということなので、同様にして、
$$
\dot{\boldsymbol{X}} = J (\nabla_{\boldsymbol{X}} K) \qquad \text{(b)}
$$が成り立っている。さて、合成関数の微分より、\(\dot{\boldsymbol{X}} = M \dot{\boldsymbol{x}}\)および\((\nabla_{\boldsymbol{x}} H) = {}^t \! M (\nabla_{\boldsymbol{X}} K)\)であることを、(a)式に代入すると、
$$
\dot{\boldsymbol{X}} = M J {}^t \! M (\nabla_{\boldsymbol{X}} K) \qquad \text{(c)}
$$とかけるので、(b)式と(c)式の係数を比較して、\(M J {}^t \! M = J\)が得られた。□
定理3.37の(Ⅱ)→(Ⅰ)の証明
先の証明と同様に、\(2N\)個の古い変数\((\boldsymbol{q}, \boldsymbol{p})\)と、新しい変数\((\boldsymbol{Q}, \boldsymbol{P})\)を、それぞれ縦ベクトル\(\boldsymbol{x}\)と\(\boldsymbol{X}\)にまとめて
$$
\boldsymbol{x} = \begin{pmatrix} \boldsymbol{q} \\ \boldsymbol{p} \end{pmatrix}, \quad \boldsymbol{X} = \begin{pmatrix} \boldsymbol{Q} \\ \boldsymbol{P} \end{pmatrix}
$$とかくと、このとき古い変数におけるハミルトンの正準方程式\(\dot{q}_i = \frac{\partial H}{\partial p_i}, \dot{p}_i = -\frac{\partial H}{\partial q_i}\)は、
$$
\dot{\boldsymbol{x}} = J (\nabla_{\boldsymbol{x}} H)
$$だけでかける。合成関数の微分より、\(\dot{\boldsymbol{X}} = M \dot{\boldsymbol{x}}, \quad (\nabla_{\boldsymbol{x}} H) = {}^t \! M (\nabla_{\boldsymbol{X}} K)\)であること、および(Ⅱ)の仮定である\(M J {}^t \! M = J\)を用いると、新しい変数における正準方程式\(\dot{\boldsymbol{X}} = J (\nabla_{\boldsymbol{X}} K)\)が導かれるため、示された。□
さてこれをふまえて、正準変換とポアソン括弧の話に移ります。
■ポアソン括弧の不変性
ここからは、正準変換でポアソン括弧がどう変わるか、という話です。結論から言うと、正準変換の前と後において、ポアソン括弧は保存されることが知られています。
それを認めるために、まずは次の定理を示しましょう。
定理3.38(基本ポアソン括弧の不変性)
次の(Ⅰ)と(Ⅱ)は同値である。
(Ⅰ) 座標変換\((\boldsymbol{q}, \boldsymbol{p}) \rightarrow \Big(\boldsymbol{Q}(\boldsymbol{q}, \boldsymbol{p},t), \boldsymbol{P}(\boldsymbol{q}, \boldsymbol{p},t) \Big)\)は正準変換である。
(Ⅱ) \(i,j=1,2,…,N\)に対して、\(\{Q_i,Q_j\}_{(\boldsymbol{q},\boldsymbol{p})}=0\), \(\{P_i,P_j\}_{(\boldsymbol{q},\boldsymbol{p})}=0\), \(\{Q_i,P_j\}_{(\boldsymbol{q},\boldsymbol{p})} =\delta_{ij}\)
定理3.38の(Ⅰ)→(Ⅱ)の証明
定理3.37をふまえて、定理3.37の(Ⅱ)→定理3.38の(Ⅱ)を示す、つまり、「定理3.37で定義した行列に対して\(M J {}^t \! M^T = J\)が成り立っているとき、\(i,j=1,2,…,N\)に対して、\(\{Q_i,Q_j\}_{(\boldsymbol{q},\boldsymbol{p})}=0\), \(\{P_i,P_j\}_{(\boldsymbol{q},\boldsymbol{p})}=0\), \(\{Q_i,P_j\}_{(\boldsymbol{q},\boldsymbol{p})} =\delta_{ij}\)が成り立つこと」を示すことにする。
新しい変数同士のポアソン括弧\(\{X_i, X_j\}\)をすべての\(i, j\)の組み合わせで計算し、行列の形に並べたものは、数学の定義から自動的に\(M J {}^t \! M^T\)という行列になるので、\(M J M^T = J\)より、
\(\{Q_i, Q_j\}_{(\boldsymbol{q},\boldsymbol{p})}\)は行列\(M J M^T = J\)の左上のブロックの成分なのでたしかに0
\(\{P_i, P_j\}_{(\boldsymbol{q},\boldsymbol{p})}\)は行列\(M J M^T = J\)の右下のブロックの成分なのでたしかに0
\(\{Q_i, P_j\}_{(\boldsymbol{q},\boldsymbol{p})}\)は行列\(M J M^T = J\)の右上のブロックの成分なのでたしかに\(\delta_{ij}\)であることが示された。□
定理3.38の(Ⅱ)→(Ⅰ)の証明
定理3.37をふまえて、定理3.38の(Ⅱ)→定理3.37の(Ⅱ)を示す、つまり、「\(i,j=1,2,…,N\)に対して、\(\{Q_i,Q_j\}_{(\boldsymbol{q},\boldsymbol{p})}=0\), \(\{P_i,P_j\}_{(\boldsymbol{q},\boldsymbol{p})}=0\), \(\{Q_i,P_j\}_{(\boldsymbol{q},\boldsymbol{p})} =\delta_{ij}\)が成り立っているとき、定理3.37で定義した行列に対して\(M J {}^t \! M^T = J\)が成り立つこと」を示すことにする。
新しい変数同士のポアソン括弧\(\{X_i, X_j\}\)をすべての\(i, j\)の組み合わせで計算し、行列の形に並べたものは、数学の定義から自動的に\(M J {}^t \! M^T\)という行列になる。一方で、定理3.38の(Ⅱ)の仮定より、新しい変数同士のポアソン括弧\(\{X_i, X_j\}\)を\(2N \times 2N\)の行列の形に並べると、左上と右下のブロックは\(O\)、右上のブロックは単位行列\(I\)、左下のブロックは\(-I\)である行列\(J\)になるので、たしかに\(M J {}^t \! M^T = J\)となる。□
ここから直ちに、正準変換の前と後において、ポアソン括弧は保存されることを示すことができます。
系3.39(ポアソン括弧の不変性)
次の(Ⅰ)と(Ⅱ)は同値である。
(Ⅰ) 座標変換\((\boldsymbol{q}, \boldsymbol{p}) \rightarrow \Big(\boldsymbol{Q}(\boldsymbol{q}, \boldsymbol{p},t), \boldsymbol{P}(\boldsymbol{q}, \boldsymbol{p},t) \Big)\)は正準変換である。
(Ⅱ) 任意の関数\(A,B\)について、\(\{A,B\}_{(\boldsymbol{Q},\boldsymbol{P})}=\{A,B\}_{(\boldsymbol{q},\boldsymbol{p})}\)
定理3.39の(Ⅰ)→(Ⅱ)の証明
定理3.37をふまえて、定理3.37の(Ⅱ)→定理3.39の(Ⅱ)を示す、つまり、「定理3.37で定義した行列に対して\(M J {}^t \! M^T = J\)が成り立っているとき、任意の関数\(A,B\)について、\(\{A,B\}_{(\boldsymbol{Q},\boldsymbol{P})}=\{A,B\}_{(\boldsymbol{q},\boldsymbol{p})}\)が成り立つこと」を示すことにする。
任意の関数\(A,B\)について、古い変数同士のポアソン括弧\(\{A, B\}_{(\boldsymbol{q},\boldsymbol{p})}\)は、数学の定義から自動的に\({}^t \! (\nabla_{\boldsymbol{x}}A)J(\nabla_{\boldsymbol{x}}B)\)とかけ、同様に、新しい変数同士のポアソン括弧\(\{A, B\}_{(\boldsymbol{Q},\boldsymbol{P})}\)は、\({}^t \! (\nabla_{\boldsymbol{X}}A)J(\nabla_{\boldsymbol{X}}B)\)とかける。さて、合成関数の微分より、\((\nabla_{\boldsymbol{x}} A) = {}^t \! M (\nabla_{\boldsymbol{X}} A)\)および\((\nabla_{\boldsymbol{x}} B) = {}^t \! M (\nabla_{\boldsymbol{X}} B)\)であることを用いると、
$$
\{A, B\}_{(\boldsymbol{q},\boldsymbol{p})} = {}^t \! \left( {}^t \! M (\nabla_{\boldsymbol{X}} A) \right) J \left( {}^t \! M (\nabla_{\boldsymbol{X}} B) \right) = {}^t \! (\nabla_{\boldsymbol{X}} A) M J {}^t \! M (\nabla_{\boldsymbol{X}} B) = {}^t \! (\nabla_{\boldsymbol{X}} A) J (\nabla_{\boldsymbol{X}} B) = \{A, B\}_{(\boldsymbol{Q},\boldsymbol{P})}
$$とかけるので示された。ただし、2つ目の等号は定理3.37の(Ⅱ)の仮定、3つ目の等号は先に述べた\(\{A, B\}_{(\boldsymbol{Q},\boldsymbol{P})}\)の数学的書き換えを用いている。□
定理3.39の(Ⅱ)→(Ⅰ)の証明
定理3.38をふまえて、定理3.39の(Ⅱ)→定理3.38の(Ⅱ)を示す、つまり、「任意の関数\(A,B\)について、\(\{A,B\}_{(\boldsymbol{Q},\boldsymbol{P})}=\{A,B\}_{(\boldsymbol{q},\boldsymbol{p})}\)が成り立っているとき、\(i,j=1,2,…,N\)に対して、\(\{Q_i,Q_j\}_{(\boldsymbol{q},\boldsymbol{p})}=0\), \(\{P_i,P_j\}_{(\boldsymbol{q},\boldsymbol{p})}=0\), \(\{Q_i,P_j\}_{(\boldsymbol{q},\boldsymbol{p})} =\delta_{ij}\)が成り立つこと」を示すことにする。
\(A\)として新しい座標\(Q_i\)、\(B\)として新しい座標\(Q_j\)を選ぶことにすると、
$$
\{Q_i, Q_j\}_{(\boldsymbol{q},\boldsymbol{p})} = \{Q_i, Q_j\}_{(\boldsymbol{Q},\boldsymbol{P})} = \sum_{k=1}^N \left( \frac{\partial Q_i}{\partial Q_k} \frac{\partial Q_j}{\partial P_k} – \frac{\partial Q_i}{\partial P_k} \frac{\partial Q_j}{\partial Q_k} \right) = \sum_{k=1}^N (\delta_{ik} \cdot 0 – 0 \cdot \delta_{jk}) = 0
$$となる。ただし、1つ目の等号は定理3.39の(Ⅱ)の仮定を、3つ目の等号は新しい座標系の中において、\(Q\)と\(P\)がそれぞれ独立した変数であるため、自分自身で微分すれば\(1\)、違う変数で微分すれば\(0\)になることを用いている。同様にして、\(\{P_i,P_j\}_{(\boldsymbol{q},\boldsymbol{p})}=0\), \(\{Q_i,P_j\}_{(\boldsymbol{q},\boldsymbol{p})} =\delta_ij\)が成り立つので、示される。□
なかなか定理が多くなってしまったので最後にまとめておきましょう。この節であげた、正準変換と同値な定義には、
- \(i=1,2,…,N\)に対して、\(\sum_{i=1}^N p_i dq_i – Hdt = \sum_{i=1}^N P_i dQ_i – Kdt + dF\)を満たす関数\(F,K\)が存在する
- 古い変数から新しい変数への変換におけるヤコビ行列\(M\)および、\(N \times N\)の単位行列\(I\)と零行列\(O\)に対する\(2N \times 2N\)の反対称行列(シンプレティック行列)\(J\)を、
$$
M =\begin{pmatrix} \frac{\partial \boldsymbol{Q}_i}{\partial \boldsymbol{q}_j} & \frac{\partial \boldsymbol{Q}_i}{\partial \boldsymbol{p}_j} \\ \frac{\partial \boldsymbol{P}_i}{\partial \boldsymbol{q}_j} & \frac{\partial \boldsymbol{P}_i}{\partial \boldsymbol{p}_j} \end{pmatrix} \qquad J = \begin{pmatrix} 0 & I \\ -I & 0 \end{pmatrix}
$$のように定義したとき、\(M J {}^t \! M^T = J\)が成り立つ - \(i,j=1,2,…,N\)に対して、\(\{Q_i,Q_j\}_{(\boldsymbol{q},\boldsymbol{p})}=0\), \(\{P_i,P_j\}_{(\boldsymbol{q},\boldsymbol{p})}=0\), \(\{Q_i,P_j\}_{(\boldsymbol{q},\boldsymbol{p})} =\delta_{ij}\)が成り立つ
- 任意の関数\(A,B\)について、\(\{A,B\}_{(\boldsymbol{Q},\boldsymbol{P})}=\{A,B\}_{(\boldsymbol{q},\boldsymbol{p})}\)が成り立つ
のようなものがありましたね。正準変換は物理学を学ぶうえでどこまでも大切な概念なので、ぜひしっかり理解してみてください。
8 ハミルトン・ヤコビ方程式
ラグランジュ形式、ハミルトン形式に次ぐ、解析力学の新たな形式として「ハミルトン・ヤコビ方程式」があります。名前だけ聞くと難しそうかもしれませんが、これはハミルトン力学の正準変換に工夫を加えたものにすぎません。次の定理を見てください。
定理3.40(ハミルトン・ヤコビ方程式)
系の一般化座標を\(\boldsymbol{q}=(q_1,q_2,…,q_N)\)、一般化運動量を\(\boldsymbol{p}=(p_1,p_2,…,p_N)\)、系に対応するハミルトニアンを\(H(\boldsymbol{q}, \boldsymbol{p},t)\)、以下の1階非線形偏微分方程式
$$
H(\boldsymbol{q}, \boldsymbol{p},t) \Big|_{\boldsymbol{p}=\nabla_{\boldsymbol{q}}S} = -\frac{\partial S}{\partial t}
$$の解に含まれる独立な\(N\)個の積分定数を\(\{P_i\}_{i=1}^N\)、その解を\(S(\boldsymbol{q},\boldsymbol{P},t)\)とかくこととする。
このとき、\(p_i = \partial S(\boldsymbol{q}, \boldsymbol{P}, t)/\partial q_i\)により関数\(\boldsymbol{P}(\boldsymbol{q}, \boldsymbol{p})\)の表式を定めるならば、\(N\)個の量\(\{\partial S/\partial P_i\}_{i=1}^N\)は時間変化しない定数である。
定理3.40の証明
\(Q_i= \partial S/\partial P_i, K=0\)とすると、1階非線形偏微分方程式の解\(S(\boldsymbol{q},\boldsymbol{P},t)\)に対し、
$$
p_i= \frac{\partial S}{\partial q_i} \qquad Q_i= \frac{\partial S}{\partial P_i} \qquad K =0= H + \frac{\partial S}{\partial t}
$$が成り立つので、定理3.33の(Ⅱ)→(Ⅰ)より、変換\((\boldsymbol{q}, \boldsymbol{p}) \rightarrow \Big(\boldsymbol{Q}(\boldsymbol{q}, \boldsymbol{p}), \boldsymbol{P}(\boldsymbol{q}, \boldsymbol{p}) \Big)\)は正準変換である。よって、
$$
\dot{Q}_i = \frac{\partial K}{\partial P_i} = 0 \qquad \dot{P}_i = -\frac{\partial K}{\partial Q_i} = 0
$$であるから、\(Q_i =\partial S/\partial P_i\)は時間変化しない定数であるとして示された。□
ここで大事なのは、式が、未知の関数\(S\)に対するたった1つの偏微分方程式しかないために、問題を代数的に処理しやすいということです。ハミルトンの正準方程式は、未知の関数\(q_i, p_i\)に対する\(2N\)個の連立常微分方程式でしたので、変数が多くなると直接解くのが困難になります。その点、ハミルトン・ヤコビ方程式は、これを未知の関数\(S\)に対するたった1つの偏微分方程式に置き換えられますから、問題を代数的に処理しやすいという特徴がありますね。
具体的に、ハミルトン・ヤコビ方程式を用いて問題を解く手順は、
- ハミルトニアン\(H(\boldsymbol{q}, \boldsymbol{p}, t)\)を記述する。
- 1階非線形偏微分方程式(ハミルトン・ヤコビ方程式)
$$
H(\boldsymbol{q}, \boldsymbol{p},t) \Big|_{\boldsymbol{p}=\nabla{\boldsymbol{q}}S} = -\frac{\partial S}{\partial t}
$$の解に含まれる独立な\(N\)個の積分定数を\(\{P_i\}_{i=1}^N\)として、完全解\(S(\boldsymbol{q},\boldsymbol{P},t)\)を求める。 - 新しい座標\(Q_i= \partial S/\partial P_i\)は時間変化しない定数になるため、\(N\)本の式
$$
Q_i = \frac{\partial S(\boldsymbol{q}, \boldsymbol{P}, t)}{\partial P_i} \quad (i=1,2,…,N)
$$はもはや微分方程式ではなく、\( \{ q_i \}_{i=1}^N \), 定数\( \{ P_i \}_{i=1}^N \), 定数\( \{ Q_i \}_{i=1}^N \), \(t\)を結ぶ単なる代数方程式であるので、これを元の座標\( \{ q_i \}_{i=1}^N \)について解くことで、時間\(t\)の関数としての軌跡\(q_i(t)\)が得られる。
というような感じです。たしかに数式を”解く”機会は、手順2の偏微分方程式についての1回だけだということが分かるかと思います。では最も単純な、力が全く働かない1次元空間上の粒子の運動で、例をみてみましょう。
例3.41
質量が\(m\)の自由粒子を考えて、この変位を\(q\)、対応する運動量を\(p\)とすると、ハミルトニアン\(H(q,p)\)は\(H(q, p) = p^2/2m\)となる。これより、ハミルトン・ヤコビ方程式は
$$
\frac{1}{2m}\left(\frac{\partial S}{\partial q}\right)^2 + \frac{\partial S}{\partial t} = 0
$$とかけ、ここでは解く過程は本題ではないので省略するが、完全解は\(S(q, P, t) = \sqrt{2mP}q – Pt\)とかける(ただし\(P\)は積分定数とする)。さて、この解\(S(q,P,t)\)を\(P\)で偏微分した量
$$
Q = \frac{\partial S}{\partial P} = \frac{\partial}{\partial P}\left(\sqrt{2mP}q – Pt\right) = \sqrt{\frac{m}{2P}}q – t
$$は定数であるから、\(q\)について逆に解くと、
$$
q(t) = \sqrt{\frac{2P}{m}} (t + Q) \qquad \text{(\(Q,P\)は初期条件で決まる定数とする)}
$$となるが、これは等速直線運動の解\(q(t) = vt + q_0\)にほかならない。
以上、解析力学をひととおり説明してみました。お疲れさまでした。
本稿に関連して、解析力学を実際の物理系に適用した例を扱っている稿をいつか作成し、以下に示しておきます。解析力学を学ぶときは、やはり抽象的な定式化だけを続けていると何をやっているかわからなくなりがちなので、具体例を通してその威力を実感することが大切になります。
参考文献
前野昌弘「よくわかる解析力学(東京図書)」
小出昭一郎「解析力学 (物理入門コース 新装版)」
コメント