
こんにちは、turtleです。現在電磁気学を学んでおりまして、その備忘録のような形でこのブログを書かせていただいております。基本的に大学の内容となっていますが、数式さえ乗り越えれば高校生でも理解できると思っていますので、どうぞよろしくお願いいたします。
さて、ラグランジュ力学においてふつう扱うのは、定理2.2.3や定理2.2.7のような、力学系のラグランジアン\(L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t)\)として、\(K \left( \dot{\boldsymbol{x}}(\boldsymbol{q}, \dot{\boldsymbol{q}}, t) \right) – V \left( \boldsymbol{x}(\boldsymbol{q}, \dot{\boldsymbol{q}}, t) \right)\)を採用できるときです。ここで、定理2.2.3と定理2.2.7について再掲しておきます。
定理2.2.3
拘束のない力学系において、その変数として直交座標\(x_1,x_2,…,x_N\)を選んだとき、任意の\(i\)に対して\(x_i\)方向のニュートンの運動方程式が\(m_i \ddot{x}_i = F_i\)とかけるとする。ただし、\(F_i\)は
$$
F_i = -\frac{\partial V}{\partial x_i} + \frac{d}{dt}\left(\frac{\partial V}{\partial \dot{x}_i}\right)
$$なるスカラー量\(V(\boldsymbol{x}, \dot{\boldsymbol{x}}, t)\)が存在するという条件を満たす。このとき、\(K=\sum_{i=1}^N (m_i \dot{x_i}^2 /2) \)とすると、力学系のラグランジアン\(L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t)\)として、\(K \left( \dot{\boldsymbol{x}}(\boldsymbol{q}, \dot{\boldsymbol{q}}, t) \right) – V \left( \boldsymbol{x}(\boldsymbol{q}, \dot{\boldsymbol{q}}, t) \right)\)を採用できる。
定理2.2.7
拘束条件がホロノミックであって理想拘束であるような力学系において、その運動を
$$
\frac{\partial L}{\partial q_i} – \frac{d}{dt} \frac{\partial L}{\partial \dot{q}_i} =\sum_{j=1}^M \lambda_j \frac{\partial G_j}{\partial q_i} \qquad (i=1,2,…,N)
$$$$
G_j(\boldsymbol{q}, t)=0 \qquad (j=1,2,…,M)
$$で記述する。ここで、その変数として直交座標\(x_1,x_2,…,x_N\)を選んだとき、任意の\(i\)に対して\(x_i\)方向のニュートンの運動方程式が\(m_i \ddot{x}_i = F_i + R_i\)とかけるとする。ただし、\(F_i\)は
$$
F_i = -\frac{\partial V}{\partial x_i} + \frac{d}{dt}\left(\frac{\partial V}{\partial \dot{x}_i}\right)
$$なるスカラー量\(V(\boldsymbol{x}, \dot{\boldsymbol{x}}, t)\)が存在するという条件を満たす外力であって、\(R_i\)は拘束力である。このとき、\(K=\sum_{i=1}^N (m_i \dot{x_i}^2 /2) \)とすると、力学系のラグランジアン\(L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t)\)として、\(K \left( \dot{\boldsymbol{x}}(\boldsymbol{q}, \dot{\boldsymbol{q}}, t) \right) – V \left( \boldsymbol{x}(\boldsymbol{q}, \dot{\boldsymbol{q}}, t) \right)\)を採用できる。
さて、こういうときにラグランジアン\(L\)が与えられたら、オイラー=ラグランジュ方程式によって完全な運動を解かずとも、ポテンシャルによって運動の大体の様子を議論することができます。物理や工学においてこれは非常に有効であるので、本稿ではポテンシャルから運動の概形を把握する議論について見ていきましょう。
ポテンシャルと運動の概形
以下、定理2.2.3や定理2.2.7のような、力学系のラグランジアン\(L\)として、\(K – V\)を採用できるときの話に限ります。このとき、ラグランジアン\(L\)が与えられるとそこから、オイラー=ラグランジュ方程式を解かないでもわかることに次のようなものがあります。
定理2.2.12
力学系のラグランジアン\(L\)として\(K – V\)を採用できるとき、ラグランジアンが時間\(t\)を直接の変数としては含まないならば、時間変化しない定数\(K+V\)の値を\(E\)とすると、運動する領域は\(V \le E\)の範囲のみに限られる。
定理2.2.12の証明
系2.2.10より、系に時間並進対称性があるならば、物理量
$$
\left( \frac{\partial L}{\partial \dot{x}} \dot{x} +\frac{\partial L}{\partial \dot{y}} \dot{y}+\frac{\partial L}{\partial \dot{z}} \dot{z}\right) – L = m(\dot{x}^2 + \dot{y}^2 + \dot{z}^2) -\left( \frac{m}{2}(\dot{x}^2 + \dot{y}^2 + \dot{z}^2) – V\right) = \frac{m}{2}(\dot{x}^2 + \dot{y}^2 + \dot{z}^2) + V = K+V
$$が時間変化に対して保存する。ここで、この定数\(K+V\)の値を\(E\)とすると、\(K=\sum_{i=1}^N (m_i \dot{x_i}^2 /2) \)は平方和より非負であるから、たしかに運動する領域は\(K=E-V \ge 0\)、すなわち\(V \le E\)の範囲のみに限られる。□
定理2.2.13
力学系のラグランジアン\(L\)として\(K – V\)を採用できるとき、ラグランジアンが時間\(t\)を直接の変数としては含まないならば、\(\nabla_{\boldsymbol{q}} V= \boldsymbol{0}\)なる位置\(\boldsymbol{q}=\boldsymbol{q}_0\)が平衡点である、つまり位置\(\boldsymbol{q}=\boldsymbol{q}_0\)に速度ゼロで置かれた質点の加速度\(\ddot{\boldsymbol{q}} \)はゼロとなる。
定理2.2.13の証明
点変換で対応する独立な座標系ならどんな一般化座標の取り方であっても、オイラー=ラグランジュ方程式が成り立って同じ運動を解として与えるので、代表して直交座標\(\boldsymbol{x}= (x_1, x_2, \dots, x_N)\)において成り立っていればよい。ここで、定理2.2.13で仮定した一般化座標\(\boldsymbol{q}=\boldsymbol{q}_0\)でのポテンシャルの勾配\(\nabla_{\boldsymbol{q}} V\)が\(\boldsymbol{0}\)であることは、
$$
\frac{\partial V}{\partial q_j} = \sum_{i=1}^N \frac{\partial V}{\partial x_i} \frac{\partial x_i}{\partial q_j}=0
$$であることと、座標変換のヤコビ行列(\(\frac{\partial x_i}{\partial q_j}\)を並べた行列)が逆行列をもつことから、対応する直交座標での位置一般化座標\(\boldsymbol{x}=\boldsymbol{x}_0\)における\(\nabla_{\boldsymbol{x}} V\)が\(\boldsymbol{0}\)であることに等価である。
さて、直交座標によるラグランジアン\(K=\sum_{i=1}^N (m_i \dot{x_i}^2 /2) \)をオイラー=ラグランジュ方程式に入れると、
$$
m_i \ddot{x}_i = – \frac{\partial V}{\partial x_i}
$$とかけるので、\(\nabla_{\boldsymbol{x}} V|_{\boldsymbol{x}=\boldsymbol{x}_0} = \boldsymbol{0}\)をふまえると、\(m_i \boldsymbol{\ddot{x}}|_{\boldsymbol{x}=\boldsymbol{x}_0} = 0\)、すなわち\(\ddot{\boldsymbol{x}}|_{\boldsymbol{x}=\boldsymbol{x}_0} =\boldsymbol{0}\)である。よって、たしかに位置\(\boldsymbol{x}=\boldsymbol{x}_0\)に速度ゼロで置かれた質点の加速度\(\ddot{\boldsymbol{x}} \)はゼロとなるから、この位置は平衡点である。□
定理2.2.14
力学系のラグランジアン\(L\)として\(K – V\)を採用できるとき、ラグランジアンが時間\(t\)を直接の変数としては含まないならば、定理2.2.13にしたがって平衡点\(\boldsymbol{q}=\boldsymbol{q}_0\)を求めることができる。これに対して、
\(\frac{\partial^2 V}{\partial q_i^2}|_{\boldsymbol{q}=\boldsymbol{q}_0} \ge 0\)ならばその平衡点は変数\(q_i\)のずれに対して安定、
\(\frac{\partial^2 V}{\partial q_i^2}|_{\boldsymbol{q}=\boldsymbol{q}_0} \le 0\)ならばその平衡点は変数\(q_i\)のずれに対して不安定である。
定理2.2.14の証明
平衡点\(\boldsymbol{q}=\boldsymbol{q}_0\)から\(q_i\)方向に微小\(\delta q_i\)だけずれた位置\(\boldsymbol{q}_0 + \delta q_i \boldsymbol{e}_i\)におけるポテンシャルは、テイラー展開で2次の微小量まで残すと、
$$
V|_{\boldsymbol{q}=\boldsymbol{q}_0 + \delta q_i \boldsymbol{e}_i} = V_{\boldsymbol{q}=\boldsymbol{q}_0} + \frac{\partial^2 V}{\partial q_i^2}|_{\boldsymbol{q}=\boldsymbol{q}_0} (\delta q_i)^2
$$となる。\(L|_{{\boldsymbol{q}=\boldsymbol{q}_0 + \delta q_i \boldsymbol{e}_i}}=K-V|{{\boldsymbol{q}=\boldsymbol{q}_0 + \delta q_i \boldsymbol{e}_i}}\)について、オイラー=ラグランジュ方程式を計算すると、\(\frac{\partial^2 V}{\partial q_i^2}|_{\boldsymbol{q}=\boldsymbol{q}_0} \ge 0\)ならば、変数\(q_i\)に対して単振動型の運動方程式、\(\frac{\partial^2 V}{\partial q_i^2}|_{\boldsymbol{q}=\boldsymbol{q}_0} \le 0\)ならば、変数\(q_i\)に対して指数関数的に増加する運動方程式が出てくるため、示される。□
これらの定理から、ポテンシャル\(V\)のグラフを書くことで、おおまかな運動の様子を判断することができます。例えば、ポテンシャル\(V\)のグラフが以下のようだったとします。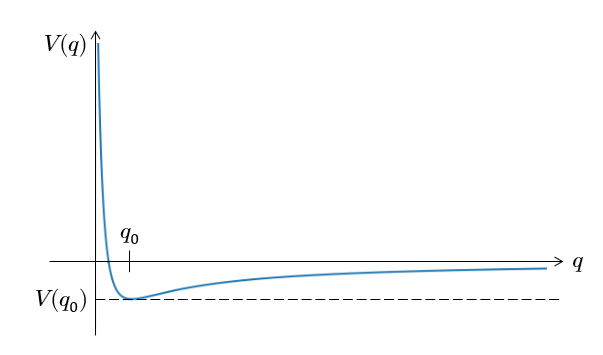
このときは、位置\(\boldsymbol{q}=\boldsymbol{q}_0\)において安定な平衡点を取り、時間変化しない定数\(K+V\)の値を\(E\)とすると、
\(E=V(q_0)\)ならば、変数\(q\)が一定の運動、
\(V< E < 0\)ならば、変数\(q\)がある閉じた範囲を動く運動、
\(0 \le E\)ならば、変数\(q\)が\(q \to \infty\)まで動くことができる運動を行うと判断できますね。
有効ポテンシャル
ラグランジアン\(L\)が与えられるとそこから、オイラー=ラグランジュ方程式を解かないでもわかることはこれだけではありません。ここからは、とくにラグランジアン\(L\)に「含まれていない」変数があるときを考えましょう。ラグランジアン\(L(\boldsymbol{q},\dot{\boldsymbol{q}},t)\)がある変数\(q_j\)を含んでいないとき、この変数\(q_j\)のことを循環座標とよびます。循環座標\(q_j\)に対して、オイラーラグランジュ方程式を立てると、
$$
\frac{d}{dt} \frac{\partial L}{\partial \dot{q}_j}= \frac{\partial L}{\partial q_j} = 0
$$となるので、時間微分するとゼロになる\(\frac{\partial L}{\partial \dot{q}_j} \equiv c \)は定数になるわけです。
言葉だとイメージしにくいので、例を出して考えてみましょう。例えば、太陽を原点とする極座標系\((r,\theta)\)を定義して、太陽のまわりを公転する惑星の万有引力による運動について議論することにします。このとき、はたらいている力はすべて保存力であるので、中心力場のポテンシャルを\(V(r)\)として、系のラグランジアンは、
$$
L(r, \dot{r}, \dot{\theta}) = \frac{1}{2}m(\dot{r}^2 + r^2\dot{\theta}^2) – V(r)
$$とかくことができます。ここで\(\theta\)は循環座標でありますから、\(\frac{\partial L}{\partial \dot{\theta}} = mr^2\dot{\theta} \equiv l \)は定数であって、\(\dot{\theta} = \frac{l}{mr^2}\)とかけますね。定数があるなら、それをラグランジアンに代入して、ラグランジアンの変数を減らしてやろう、、、と考えるのが自然です。試しに代入してみると、
$$
\tilde{L}(r, \dot{r}) = \frac{1}{2}m\dot{r}^2 + \frac{l^2}{2m r^2} – V(r)
$$となって、なかなか有用なように見えますが、実はこれはラグランジアンとして間違えています。というのは、この\(\tilde{L}\)を使ってオイラー=ラグランジュ方程式
$$
\frac{d}{dt}\left(\frac{\partial \tilde{L}}{\partial \dot{r}}\right) – \frac{\partial \tilde{L}}{\partial r} = 0
$$を計算すると、\(m\ddot{r} = -\frac{l^2}{mr^3} – \frac{\partial V}{\partial r}\)となり、遠心力の項の符号がマイナスになっているため、回転すればするほど内側に吸い寄せられるという、物理的にありえない方程式が出てきているんですね。
間違った方程式が出てしまった理由は「偏微分\(\frac{\partial}{\partial r}\)を計算するときに、何を一定とみなしているかがすり替わってしまったから」です。
正しい\(L(r, \dot{r}, \dot{\theta})\)の場合は、\(\frac{\partial L}{\partial r}\)を計算するとき、\(\dot{\theta}\)は独立した変数なので、定数扱いして微分しますよね。
しかし、直接代入した \(\tilde{L}(r, \dot{r})\)の場合は、\(\dot{\theta}\)を\(\frac{l}{mr^2}\)に置き換えてしまったため、\(\dot{\theta}\)の中に\(r\)が入り込んでしまい、\(\dot{\theta}\)が\(r\)に従属な変数として微分されているのです。
では、どうすればいいか。それには以下のことを使います。ただし、以下の定理中だけの記法として、引数の組\((q_1,…,q_{j-1},q_{j+1},…q_N,\dot{q}_1,…,\dot{q}_{j-1},\dot{q}_{j+1},…,\dot{q}_N)\)を\((\tilde{\boldsymbol{q}},\dot{\tilde{\boldsymbol{q}}})\)とかくことにします。
定理2.2.15(ルジャンドル変換とラウシアン)
ラグランジアン\(L(\boldsymbol{q},\dot{\boldsymbol{q}},t)\)がある変数\(q_j\)を含んでいないとき、定数\(\frac{\partial L}{\partial \dot{q}_j}\)を\(c\)とすると、
$$
R(\tilde{\boldsymbol{q}},\dot{\tilde{\boldsymbol{q}}}) = L(\tilde{\boldsymbol{q}}, \dot{\boldsymbol{q}}, \dot{q}_j(\tilde{\boldsymbol{q}},\dot{\tilde{\boldsymbol{q}}})) – c \dot{q_j}(\tilde{\boldsymbol{q}},\dot{\tilde{\boldsymbol{q}}})
$$としたとき、\(i \ne j\)に対して、以下のオイラー=ラグランジュ方程式が成り立つ。
$$
\frac{\partial R}{\partial q_i} – \frac{d}{dt} \frac{\partial R}{\partial \dot{q}_i} =0
$$
定理2.2.15の証明
与えられたラウシアンの定義式\(R(\tilde{\boldsymbol{q}},\dot{\tilde{\boldsymbol{q}}}) = L(\tilde{\boldsymbol{q}}, \dot{\boldsymbol{q}}, \dot{q}_j(\tilde{\boldsymbol{q}},\dot{\tilde{\boldsymbol{q}}})) – c \dot{q_j}(\tilde{\boldsymbol{q}},\dot{\tilde{\boldsymbol{q}}})\)を、\(q_i\)と\(\dot{q}_i\)\((i \ne j)\)でそれぞれ偏微分すると、合成関数の微分より、
$$
\frac{\partial R}{\partial q_i} = \left( \frac{\partial L}{\partial q_i} + \frac{\partial L}{\partial \dot{q}_j} \frac{\partial \dot{q}_j}{\partial q_i} \right) -c \frac{\partial \dot{q}_j}{\partial q_i} \ = \frac{\partial L}{\partial q_i} – c \frac{\partial \dot{q}_j}{\partial q_i} -c \frac{\partial \dot{q}_j}{\partial q_i} \frac{\partial L}{\partial q_i} – c \frac{\partial \dot{q}_j}{\partial q_i} = \frac{\partial L}{\partial q_i}
$$$$
\frac{\partial R}{\partial \dot{q}_i} = \left( \frac{\partial L}{\partial \dot{q}_i} + \frac{\partial L}{\partial \dot{q}_j} \frac{\partial \dot{q}_j}{\partial \dot{q}_i} \right) – c \frac{\partial \dot{q}_j}{\partial \dot{q}_i} = \frac{\partial L}{\partial \dot{q}_i} + c \frac{\partial \dot{q}_j}{\partial \dot{q}_i} – c \frac{\partial \dot{q}_j}{\partial \dot{q}_i} = \frac{\partial L}{\partial \dot{q}_i}
$$となるので、元のオイラー=ラグランジュ方程式
$$
\frac{\partial L}{\partial q_i} – \frac{d}{dt} \frac{\partial L}{\partial \dot{q}_i} =0
$$に代入することで、示される。□
さて、つまり先ほどの万有引力が相互作用する太陽と惑星の系では、ラウシアンとして、
$$
R = L – \frac{\partial L}{\partial \dot{\theta}} \dot{\theta} = \left( \frac{1}{2}m\dot{r}^2 + \frac{1}{2}mr^2\dot{\theta}^2 – V(r) \right) – l\dot{\theta} = \frac{1}{2}m\dot{r}^2 – \left[ V(r) + \frac{l^2}{2mr^2} \right]
$$と定義するとうまくいくというわけです。このとき、\(m\dot{r}^2/2\)は\(r\)のみを変数とするときの運動エネルギーとなっていますから、大カッコ\([\quad]\)の中身を有効ポテンシャル\(V_{eff}\)とすると、先に紹介した定理2.2.12、定理2.2.13、定理2.2.14の\(V\)を\(V_{eff}\)にかえたものが、すべて成り立ちます。
このように、循環座標があるときは、ラウシアンをつくることで変数を消去して次元を落とした議論をすることができ、有効ポテンシャル\(V_{eff}\)のグラフを書くことで、おおまかな運動の様子を判断することができます。
コメント