
こんにちは、turtleです。現在力学を学んでおりまして、その備忘録のような形でこのブログを書かせていただいております。基本的に大学の内容となっていますが、数式さえ乗り越えれば高校生でも理解できると思っていますので、どうぞよろしくお願いいたします。
さて、いままでの稿では質点の力学をラグランジアンを用いて再構成してきましたが、これは物体の大きさを無視するという仮定を前提にしている一方で、現実に多数の質点からなる”物体”を考えるときはその大きさが無視できないときもしばしばあります。ここでは、このような大きさの無視できない多質点系の力学について考えていきますが、物体を構成する粒子1つ1つに対して力学を計算するというのはどうにも現実的ではありません。
そこで、原子や分子をすべて計算し尽くすことは不可能であるので、代わりに、現実の物質をよく説明するモデルを考えます。先に言ってしまうと、よく用いられるのは、
多数の質点からなるが、それらの間の距離が常に一定であって変形しない剛体というモデル
原子や分子といった離散的な集合を平均化した、空間内に質点が連続的に分布する連続体というモデル
です。本稿では、後者の連続体というモデルを考えて、別の稿で前者の剛体のモデルを扱います。
1次元連続体のラグランジアン
一般的な連続体の話に入る前に、具体的な例として、弦の振動のラグランジアンを考えてみます。とはいっても、弦は連続体ですから、いままでと同じようにラグランジアンを(運動エネルギー)\(-\)(ポテンシャルエネルギー)とかけるかは疑問ですし、そもそも(ポテンシャルエネルギー)の表式もわかりませんよね。
そこで、ここでは弦を、質量のないばねでつながれた無限の質点の連成振動系とみなすことにしましょう。こうみることで、有限の質点の連成振動系におけるラグランジアンを考えてから、それを\(\infty\)にとばして、弦の振動のラグランジアンを与えることができます。
定理2.2.17
弦の単位長さ当たりの質量を\(\rho\)、張力を\(T\)とすると、長さ\(l\)の弦のラグランジアンは、弦の各点の変位を\(\Phi(x,t)\)としたとき、以下のようにかける。
$$
L= \int_{x=0}^{x=l} dx \left[ \frac{1}{2} \rho \left( \frac{\partial \Phi}{\partial t} \right)^2 – \frac{1}{2} T \left( \frac{\partial \Phi}{\partial x} \right)^2 \right]
$$
定理2.2.17の証明
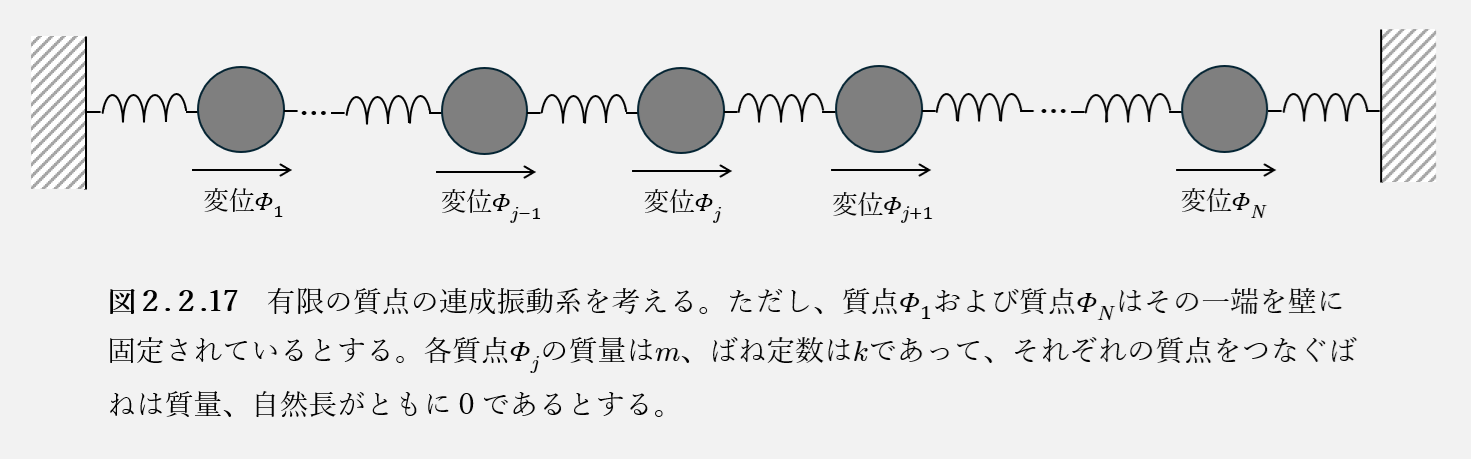 図2.2.17のような、有限の質点の連成振動系を考えると、定理2.2.3よりこの系のラグランジアンとして(運動エネルギー\(K\))\(-\)(ポテンシャルエネルギー\(V\))を採用できる。
図2.2.17のような、有限の質点の連成振動系を考えると、定理2.2.3よりこの系のラグランジアンとして(運動エネルギー\(K\))\(-\)(ポテンシャルエネルギー\(V\))を採用できる。
まず、各質点\(\Phi_j\)の質量は\(m\)、速度は\(\dot{\Phi}_j\)なので、全体の運動エネルギーは$$
K = \sum_{j=1}^{N} \frac{1}{2} m \dot{\Phi}_j^2
$$とかくことができる。続いて、両端が壁に固定されているため、壁の変位を\(\Phi_0 = 0\)、\(\Phi_{N+1} = 0\)と書くことにすると、ばねの自然長は0であるため、質点\(\Phi_{j-1}\)と\(\Phi_j\)の間のばねの伸びは\(\Phi_j – \Phi_{j-1}\)となるから、系全体の弾性エネルギーは
$$
V = \sum_{j=1}^{N+1} \frac{1}{2} k (\Phi_j – \Phi_{j-1})^2
$$とかくことができる。これらから、\(N\)個の質点系のラグランジアン\(L_N\)としては
$$
L_N = \sum_{j=1}^{N} \frac{1}{2} m \dot{\Phi}_j^2 – \sum_{j=1}^{N+1} \frac{1}{2} k (\Phi_j – \Phi_{j-1})^2
$$を採用できるといえる。
ここから連続極限をとることを考える。質点間の釣り合いの距離を\(a\)とすると、\(l = (N+1)a\)、\(m = \rho a\)、\(k = T/a\)とかけるから、
$$
L_N = \sum \left\{ \frac{1}{2} (\rho a) \dot{\Phi}_j^2 – \frac{1}{2} \left( \frac{T}{a} \right) (\Phi_j – \Phi_{j-1})^2 \right\} = \sum a \left\{ \frac{1}{2} \rho \dot{\Phi}_j^2 – \frac{1}{2} T \left( \frac{\Phi_j – \Phi_{j-1}}{a} \right)^2 \right\}
$$に対して、\(N \to \infty\)とすると、位置の指標\(j\)は連続的な空間座標\(x\)に、離散的な変位 \(\Phi_j(t)\)は場の変位\(\Phi(x,t)\)に、\(\dot{\Phi}_j\)は時間偏微分\(\frac{\partial \Phi}{\partial t}\)に、\(\frac{\Phi_j – \Phi_{j-1}}{a}\)は位置の微小変化に対する変位の変化率なので空間偏微分\(\frac{\partial \Phi}{\partial x}\)に、和は積分になって、
$$
\lim_{N \to \infty} L_N = L = \int_{x=0}^{x=l} dx \left[ \frac{1}{2} \rho \left( \frac{\partial \Phi}{\partial t} \right)^2 – \frac{1}{2} T \left( \frac{\partial \Phi}{\partial x} \right)^2 \right]
$$とかける。これより示された。□
さて、ここで注目すべきは、ラグランジアンが空間の積分の形で表せていることです。これは、物体の微視的で離散的な構造を無視して、連続的な物質分布による連続的な場として扱うという仮定をしたからこその結論です。
ここで、大カッコ\([\quad]\)の中身をラグランジアン密度\(\mathcal{L}\)とよぶことにすると、一般に、1次元の連続体においてラグランジアン密度は\(\Phi, \frac{\partial \Phi}{\partial x}, \frac{\partial \Phi}{\partial t}\)を引数とする関数\(\mathcal{L}(\Phi, \frac{\partial \Phi}{\partial x}, \frac{\partial \Phi}{\partial t})\)とかけます。
これについて、以下が成り立ちます。
定理2.2.18(1次元の場におけるオイラー=ラグランジュ方程式)
1次元の場\(\Phi(x,t)\)においてラグランジアン密度を\(\mathcal{L}(\Phi, \frac{\partial \Phi}{\partial x}, \frac{\partial \Phi}{\partial t})\)とすると、以下が成り立つ。
$$
\frac{\partial \mathcal{L}}{\partial \Phi} – \frac{\partial}{\partial t} \left( \frac{\partial \mathcal{L}}{\partial \left( \frac{\partial \Phi}{\partial t} \right)} \right) – \frac{\partial}{\partial x} \left( \frac{\partial \mathcal{L}}{\partial \left( \frac{\partial \Phi}{\partial x} \right)} \right) = 0
$$
定理2.2.18の証明
まず、ラグランジアン密度\(\mathcal{L}\)を用いた作用\(S\)は、\(x_1\)から\(x_2\)までの空間の積分と、\(t_1\)から \(t_2\)までの時間の積分の二重積分として次のように定義される。
$$
S = \int_{t_1}^{t_2} dt \int_{x_1}^{x_2} dx \, \mathcal{L} \left( \Phi, \frac{\partial \Phi}{\partial x}, \frac{\partial \Phi}{\partial t} \right)
$$ここで、現実の物理的な運動\(\Phi(x,t)\)に対して、\(\delta \Phi(x, t_1) = \delta \Phi(x, t_2) = 0, \delta \Phi(x_1, t) = \delta \Phi(x_2, t) = 0\)を満足する、つまり時間的あるいは空間的な境界を固定した仮想的な微小変化\(\delta \Phi(x,t)\)をさせた経路\(\Phi+\delta \Phi\)を考えると、作用はその定義より対応する変分\(\delta S\)がゼロになる。
一方で、この変分\(\delta S\)を二重積分の表式から計算すると、ラグランジアン密度\(\mathcal{L}\)の、\(\Phi, \frac{\partial \Phi}{\partial x}, \frac{\partial \Phi}{\partial t}\) の3つの変数についての多変数関数のテイラー展開を用いて、
\begin{align}
\delta S &= \int_{t_1}^{t_2} dt \int_{x_1}^{x_2} dx \left\{ \frac{\partial \mathcal{L}}{\partial \Phi} \delta \Phi + \frac{\partial \mathcal{L}}{\partial \left( \frac{\partial \Phi}{\partial x} \right)} \delta \left( \frac{\partial \Phi}{\partial x} \right) + \frac{\partial \mathcal{L}}{\partial \left( \frac{\partial \Phi}{\partial t} \right)} \delta \left( \frac{\partial \Phi}{\partial t} \right) \right\} \\
&= \int_{t_1}^{t_2} dt \int_{x_1}^{x_2} dx \left\{ \frac{\partial \mathcal{L}}{\partial \Phi} \delta \Phi + \frac{\partial \mathcal{L}}{\partial \left( \frac{\partial \Phi}{\partial x} \right)} \frac{\partial}{\partial x} (\delta \Phi) + \frac{\partial \mathcal{L}}{\partial \left( \frac{\partial \Phi}{\partial t} \right)} \frac{\partial}{\partial t} (\delta \Phi) \right\} \\
&= \int_{t_1}^{t_2} dt \int_{x_1}^{x_2} dx \left\{ \frac{\partial \mathcal{L}}{\partial \Phi} – \frac{\partial}{\partial x} \left( \frac{\partial \mathcal{L}}{\partial \left( \frac{\partial \Phi}{\partial x} \right)} \right) – \frac{\partial}{\partial t} \left( \frac{\partial \mathcal{L}}{\partial \left( \frac{\partial \Phi}{\partial t} \right)} \right) \right\} \delta \Phi
\end{align}とかける。ただし、2つ目の等号は、極限の定義を考えると、
$$
\delta \left( \frac{\partial}{\partial a} \Phi(a) \right) = \lim_{a_2 \to a_1} \left( \frac{\left( \Phi(a_2)+\delta \Phi(a_2) \right) – \left( \Phi(a_1)+\delta \Phi(a_1) \right)}{a_2-a_1} – \frac{\Phi(a_2) – \Phi(a_1)}{a_2-a_1} \right) = \frac{\partial}{\partial a} \delta \Phi(a)
$$より、変分の微分と微分の変分が等しいこと、つまり変分と偏微分の順序を入れ替えることができること、3つ目の等号は、第2項については空間について部分積分を行うことで、
$$
\int_{x_1}^{x_2} dx \left[ \frac{\partial \mathcal{L}}{\partial \left( \frac{\partial \Phi}{\partial x} \right)} \frac{\partial}{\partial x} (\delta \Phi) \right] = \left[ \frac{\partial \mathcal{L}}{\partial \left( \frac{\partial \Phi}{\partial x} \right)} \delta \Phi \right]_{x_1}^{x_2} – \int_{x_1}^{x_2} dx \left[ \frac{\partial}{\partial x} \left( \frac{\partial \mathcal{L}}{\partial \left( \frac{\partial \Phi}{\partial x} \right)} \right) \delta \Phi \right]
$$となること、第3項については時間について部分積分を行うことで、
$$
\int_{t_1}^{t_2} dt \left[ \frac{\partial \mathcal{L}}{\partial \left( \frac{\partial \Phi}{\partial t} \right)} \frac{\partial}{\partial t} (\delta \Phi) \right] = \left[ \frac{\partial \mathcal{L}}{\partial \left( \frac{\partial \Phi}{\partial t} \right)} \delta \Phi \right]_{t_1}^{t_2} – \int_{t_1}^{t_2} dt \left[ \frac{\partial}{\partial t} \left( \frac{\partial \mathcal{L}}{\partial \left( \frac{\partial \Phi}{\partial t} \right)} \right) \delta \Phi \right]
$$となることを用いた。さて、任意の変分\(\delta \Phi\)に対して、\(\delta S = 0\)が成り立つことから、変分法の基本補題より、中括弧\(\{\quad\}\)の中身自体がすべての\(x, t\)において恒等的にゼロでなければならないので、以下が成り立つことが示される。
$$
\frac{\partial \mathcal{L}}{\partial \Phi} – \frac{\partial}{\partial t} \left( \frac{\partial \mathcal{L}}{\partial \left( \frac{\partial \Phi}{\partial t} \right)} \right) – \frac{\partial}{\partial x} \left( \frac{\partial \mathcal{L}}{\partial \left( \frac{\partial \Phi}{\partial x} \right)} \right) = 0
$$□
さて、ここで導いたこの方程式は、いままで有限の個数の質点の運動のみを考えていたときからは大きな飛躍をしています。というのは、この方程式は、場の力学も解析力学の枠組みに落とし込んで考えられることの現れだからです。
本稿ではこの1次元の場におけるオイラー=ラグランジュ方程式の導出までで一旦とどめておきますが、この先、場におけるオイラー=ラグランジュ方程式は物理学を深めるうえで欠かせないものになります。
コメント