
こんにちは、turtleです。現在力学を学んでおりまして、その備忘録のような形でこのブログを書かせていただいております。基本的に大学の内容となっていますが、数式さえ乗り越えれば高校生でも理解できると思っていますので、どうぞよろしくお願いいたします。
さて、親記事では、剛体のラグランジアンとして実際に何を採用できるのか、剛体のオイラー=ラグランジュ方程式はどういう形をとるのかについて確認をしていました。本稿で、外力の働かない、すなわち自由な剛体の運動を考えるにあたって、これを振り返るために、定理2.2.Aと定理2.2.Bを再掲しておきます。
定理2.2.A
多数の質点からなり、それらの間の距離が常に一定であって変形しないという剛体のモデルにおいて、ラグランジアン\(L\)が定まるとすると、これは独立な6つの変数\(\boldsymbol{q}=(q_1, q_2, \dots, q_6)\)を用いて\(\tilde{L}(\boldsymbol{q}, \dot{\boldsymbol{q}},t)\)と書き換えることができ、このとき\(i=1,2,…,6\)に対して以下が成り立つ。
$$
\frac{\partial \tilde{L}}{\partial q_i} – \frac{d}{dt} \frac{\partial \tilde{L}}{\partial \dot{q}_i} = 0
$$
定理2.2.B
剛体の体積を\(\mathcal{V}\)、剛体に固定された座標系による位置\(\boldsymbol{s}\)における質量密度を\(\rho(\boldsymbol{s})\)、剛体内の各微小体積要素の空間に固定された座標系による位置を\(\boldsymbol{r}(\boldsymbol{s}, t)\)としたとき、任意の微小要素\(d \mathcal{V}\)に対してニュートンの運動方程式が\(\rho(\boldsymbol{s}) \ddot{\boldsymbol{r}}(\boldsymbol{s}, t) d\mathcal{V} = \boldsymbol{f}(\boldsymbol{s}, t) dV + \boldsymbol{r}_c(\boldsymbol{s}, t) d\mathcal{V}\)とかけるとする。ただし、\(\boldsymbol{f}(\boldsymbol{s}, t)\)は、
$$
\boldsymbol{f}(\boldsymbol{s}, t) = -\nabla_{\boldsymbol{r}} v + \frac{d}{dt} \nabla_{\dot{\boldsymbol{r}}} v
$$なるスカラー密度量\(v(\boldsymbol{r}, \dot{\boldsymbol{r}}, t)\)が存在するという条件を満たす外力密度であって、\(\boldsymbol{r}_c\)は剛体の形状を維持するための拘束力密度である。このとき、
$$
K=\int_\mathcal{V} \left\{ \frac{1}{2} \rho(\boldsymbol{s}) |\dot{\boldsymbol{r}}(\boldsymbol{s}, t)|^2 \right\} d\mathcal{V} \qquad
V=\int_\mathcal{V} v(\boldsymbol{r}(\boldsymbol{s}, t), \dot{\boldsymbol{r}}(\boldsymbol{s}, t), t) d\mathcal{V}
$$とすると、定理2.2.Aを満たすラグランジアンとして、\(\boldsymbol{r}, \dot{\boldsymbol{r}}\)を\(\boldsymbol{q}, \dot{\boldsymbol{q}}\)で表した以下を採用できる。
$$
\tilde{L}(\boldsymbol{q}, \dot{\boldsymbol{q}},t)=K(\boldsymbol{q}, \dot{\boldsymbol{q}},t)-V(\boldsymbol{q}, \dot{\boldsymbol{q}},t)
$$
剛体の運動エネルギー
本稿では、外力の働かない剛体の運動を考えていきます。目標はこの運動の厳密な解析解を得ることとします。ではまず、定理2.2.Bより剛体のラグランジアン\(\tilde{L}\)は、
$$
\tilde{L}(\boldsymbol{q}, \dot{\boldsymbol{q}},t)=K(\boldsymbol{q}, \dot{\boldsymbol{q}},t) = \int_\mathcal{V} \left\{ \frac{1}{2} \rho(\boldsymbol{s}) |\dot{\boldsymbol{r}}(\boldsymbol{s}, t)|^2 \right\} d\mathcal{V}
$$を採用することができ、これに対して定理2.2.Aより、独立な6つの変数\(\boldsymbol{q}=(q_1, q_2, \dots, q_6)\)に対して、以下が成り立つことまでわかっています。
$$
\frac{\partial \tilde{L}}{\partial q_i} – \frac{d}{dt} \frac{\partial \tilde{L}}{\partial \dot{q}_i} = 0 \qquad (i=1,2,…,6)
$$さて、自由な剛体の運動に対する方程式を立てるには、まず剛体のラグランジアン、すなわち運動エネルギー\(K\)を独立な6変数のみでかかなければなりません。これについてまず考えましょう。
慣性テンソルの扱い方
まず、この段落を理解するのに大変重要な、慣性テンソルについて定義したあと、剛体の運動エネルギーを変形していきます。
定義2.2.B.1(慣性テンソルの定義)
ある直交座標系\(O-XYZ\)(空間固定の座標系でも、剛体固定の座標系でも何でもよい)を考え、剛体に固定された座標系による位置\(\boldsymbol{s}\)における質量密度を\(\rho(\boldsymbol{s})\)とすると、
$$
I_{XX} = \int_V \rho(\boldsymbol{s}) (y^2 + z^2) dV \qquad
I_{YY} = \int_V \rho(\boldsymbol{s}) (z^2 + x^2) dV \qquad
I_{ZZ} = \int_V \rho(\boldsymbol{s}) (x^2 + y^2) dV
$$$$
I_{XY}=I_{YX}= – \int_V \rho(\boldsymbol{s}) xy dV \qquad
I_{YZ}=I_{ZY}= – \int_V \rho(\boldsymbol{s}) yz dV \qquad
I_{ZX}=I_{XZ}= – \int_V \rho(\boldsymbol{s}) zx dV
$$というように、剛体に関する体積分の形式で9個の物理量を与えることができる。このとき以下で定義される\(3 \times 3\)の実対称行列を慣性テンソル\(I\)と定義する。
$$
I= \begin{pmatrix} I_{xx} & I_{xy} & I_{xz} \\ I_{yx} & I_{yy} & I_{yz} \\ I_{zx} & I_{zy} & I_{zz} \end{pmatrix}
$$
定理2.2.B.2
剛体の全質量を\(M\)、重心の位置を\(\boldsymbol{r}_G\)、ある重心を原点とした直交座標系\(O-XYZ\)(空間固定の座標系でも、剛体固定の座標系でも何でもよい)に対する剛体の慣性テンソルを\(I\)、剛体の角速度ベクトル(回転軸方向のうち回転の方向に右ねじを回して進む方を向いた、大きさが角速度に等しいベクトル)を\(\boldsymbol{\omega}=(\omega_X, \omega_Y, \omega_Z)\)としたとき、剛体の運動エネルギー\(K= \int_\mathcal{V} \left\{ \frac{1}{2} \rho(\boldsymbol{s}) |\dot{\boldsymbol{r}}(\boldsymbol{s}, t)|^2 \right\} d\mathcal{V}\)は、以下のようにかける。
$$
K=\frac{1}{2} M{\dot{\boldsymbol{r}}_G}^2 + \frac{1}{2} {}^t \boldsymbol{\omega} I \boldsymbol{\omega}
$$
定理2.2.B.2の証明
空間に固定された原点\(O\)から見た剛体内の微小要素の位置ベクトルを\(\boldsymbol{r}(\boldsymbol{s}, t)\)、重心の位置ベクトルを\(\boldsymbol{r}_G(t)\)、重心から見た微小要素の相対位置ベクトルを\(\boldsymbol{s}'(t)\)とすると、定義より\(\boldsymbol{r} = \boldsymbol{r}_G + \boldsymbol{s}’\)が成立し、これを時間\(t\)で微分すると\(\dot{\boldsymbol{r}} = \dot{\boldsymbol{r}}_G + \dot{\boldsymbol{s}}’\)とかける。
ここで剛体の拘束条件より、重心から見た微小要素の運動は「重心を通る軸まわりの回転運動」であるから、角速度ベクトル\(\boldsymbol{\omega}\)を用いて \(\dot{\boldsymbol{s}}’ = \boldsymbol{\omega} \times \boldsymbol{s}’\)とかけるので、\(\dot{\boldsymbol{r}} = \dot{\boldsymbol{r}}_G + (\boldsymbol{\omega} \times \boldsymbol{s}’)\)とかける。これを運動エネルギーの定義式\(K = \int_\mathcal{V} \frac{1}{2} \rho(\boldsymbol{s}) |\dot{\boldsymbol{r}}|^2 d\mathcal{V}\)に代入すると、
$$
K = \int_\mathcal{V} \frac{1}{2} \rho(\boldsymbol{s}) d \mathcal{V} \left[ \dot{\boldsymbol{r}}_G + (\boldsymbol{\omega} \times \boldsymbol{s}’) \right]^2 = \int_\mathcal{V} \frac{1}{2} \rho(\boldsymbol{s}) |\dot{\boldsymbol{r}}_G|^2 d\mathcal{V} + \int_\mathcal{V} \rho(\boldsymbol{s}) \dot{\boldsymbol{r}}_G \cdot (\boldsymbol{\omega} \times \boldsymbol{s}’) d\mathcal{V} + \int_\mathcal{V} \frac{1}{2} \rho(\boldsymbol{s}) |\boldsymbol{\omega} \times \boldsymbol{s}’|^2 d\mathcal{V}
$$となる。第1項、第2項、第3項はそれぞれ以下のように書き換えられる。
$$
\int_\mathcal{V} \frac{1}{2} \rho(\boldsymbol{s}) |\dot{\boldsymbol{r}}_G|^2 d\mathcal{V} = \frac{1}{2} |\dot{\boldsymbol{r}}_G|^2 \int_\mathcal{V} \rho(\boldsymbol{s}) d\mathcal{V} = \frac{1}{2} M |\dot{\boldsymbol{r}}_G|^2
$$$$
\int_\mathcal{V} \rho(\boldsymbol{s}) \dot{\boldsymbol{r}}_G \cdot (\boldsymbol{\omega} \times \boldsymbol{s}’) d\mathcal{V} = \dot{\boldsymbol{r}}_G \cdot \left( \boldsymbol{\omega} \times \int_\mathcal{V} \rho(\boldsymbol{s}) \boldsymbol{s}’ d\mathcal{V} \right) = \boldsymbol{0}
$$$$
\int_\mathcal{V} \frac{1}{2} \rho(\boldsymbol{s}) |\boldsymbol{\omega} \times \boldsymbol{s}’|^2 d\mathcal{V} = \frac{1}{2} \sum_{i, j} \omega_i \omega_j \left( \int_\mathcal{V} \rho(\boldsymbol{s}) (|\boldsymbol{s}’|^2 \delta_{ij} – s’_i s’_j) d\mathcal{V} \right) = \frac{1}{2} {}^t \boldsymbol{\omega} I \boldsymbol{\omega}
$$ただし、第2項の2つ目の等号は\(\int_\mathcal{V} \rho(\boldsymbol{s}) \boldsymbol{s}’ d\mathcal{V}\)が重心から見た重心の相対位置を表すため\(\boldsymbol{0}\)であることを、第3項の1つ目の等号は、ベクトル解析の公式\(|\boldsymbol{a} \times \boldsymbol{b}|^2 = |\boldsymbol{a}|^2 |\boldsymbol{b}|^2 – (\boldsymbol{a} \cdot \boldsymbol{b})^2\)であることを用いた。以上より、\(K = \frac{1}{2} M |\dot{\boldsymbol{r}}_G|^2 + \frac{1}{2} {}^t \boldsymbol{\omega} I \boldsymbol{\omega}\)と書けることが示された。□
さらにこれを簡単な表式にするために、次のことを示します。
定理2.2.B.3
剛体に固定された重心を原点とした直交座標系\(O-\mathcal{X} \mathcal{Y} \mathcal{Z}\)であって、これに対応する慣性テンソル\(\mathcal{I}\)の非対角成分がすべてゼロになる座標系が存在する。
定理2.2.B.3の証明
まず、剛体の重心を原点とし、剛体に固定された任意の直交座標系\(O-XYZ\)をとると、この座標系において計算された慣性テンソル\(I\)は\(3 \times 3\)の行列として次のようにかける。
$$
I = \begin{pmatrix} I_{xx} & I_{xy} & I_{xz} \\ I_{yx} & I_{yy} & I_{yz} \\ I_{zx} & I_{zy} & I_{zz} \end{pmatrix}
$$ここで、非対角成分について定義より、\(I_{xy} = I_{yx}, I_{yz} = I_{zy}, I_{zx} = I_{xz}\)であるから、慣性テンソルは実対称行列であるが、線形代数の定理より任意の実対称行列は、ある直交行列\(R\)を用いて必ず対角化可能で、その対角成分はすべて実数であることが分かっているので、
$$
{}^t R I R = \mathcal{I} = \begin{pmatrix} \mathcal{I}_{\mathcal{X}} & 0 & 0 \\ 0 & \mathcal{I}_{\mathcal{Y}} & 0 \\ 0 & 0 & \mathcal{I}_{\mathcal{Z}} \end{pmatrix}
$$が実対角行列であるような直交行列\(R\)が存在するといえる。
3次元空間における直交行列\(R\)は、物理的には「座標軸の回転」を意味しており、\({}^t R I R\) という行列の演算は、元の基底となる座標系\(O-XYZ\)を行列\(R\)によって回転させて、新しい基底となる直交座標系\(O-\mathcal{X}\mathcal{Y}\mathcal{Z}\)へ移るような座標変換そのものであるから、示された。□
定義2.2.B.4(慣性主軸の定義)
剛体に固定された重心を原点とした直交座標系\(O-\mathcal{X} \mathcal{Y} \mathcal{Z}\)であって、これに対応する慣性テンソル\(\mathcal{I}\)の非対角成分がすべてゼロになる座標系を慣性主軸と定義する。
定理2.2.B.2において、はじめに任意に設定した直交座標系が慣性主軸だったとすると、慣性テンソルは非対角化成分がゼロになるので、運動エネルギーは、
$$
K=\frac{1}{2} M{\dot{\boldsymbol{r}}_G}^2 + \frac{1}{2} {}^t \boldsymbol{\omega} I \boldsymbol{\omega} = \frac{1}{2} M{\dot{\boldsymbol{r}}_G}^2 + \frac{1}{2} \left( \mathcal{I}_{\mathcal{X} \mathcal{X}} {\omega_{\mathcal{X}}}^2 + \mathcal{I}_{\mathcal{Y} \mathcal{Y}} {\omega_{\mathcal{Y}}}^2 +
\mathcal{I}_{\mathcal{Z} \mathcal{Z}} {\omega_{\mathcal{Z}}}^2 \right)
$$と書き換えることができますね。さて、自由な剛体の運動に対する方程式を立てるには、まず剛体のラグランジアン、すなわち運動エネルギー\(K\)を、剛体の位置と姿勢を表す独立な6変数のみでかかなければならないのでした。ここで、いま\(( X_G,Y_G,Z_G,\omega_{\mathcal{X}},\omega_{\mathcal{Y}},\omega_{\mathcal{Z}})\)の6変数で書けているような気がするかもしれませんが、それは実は誤りです。というのは、決してこの6変数が分かったからといって剛体の姿勢は決まらないからです。\(\omega_{\mathcal{X}},\omega_{\mathcal{Y}},\omega_{\mathcal{Z}}\)の3変数は角度を直接指定してはいないので、剛体がどういう姿勢をとっているか説明できないですよね。
ただ「運動エネルギー\(K\)を剛体の位置と姿勢を表す独立な6変数のみでかく」という目標にはずいぶん近づいてきましたよ。あとは、剛体の姿勢を表す3つの角度変数で、\(\omega_{\mathcal{X}},\omega_{\mathcal{Y}},\omega_{\mathcal{Z}}\)を表すのみです。3つの角度変数として、以下を導入します。
オイラー角の導入
定義2.2.B.5(オイラー角の定義)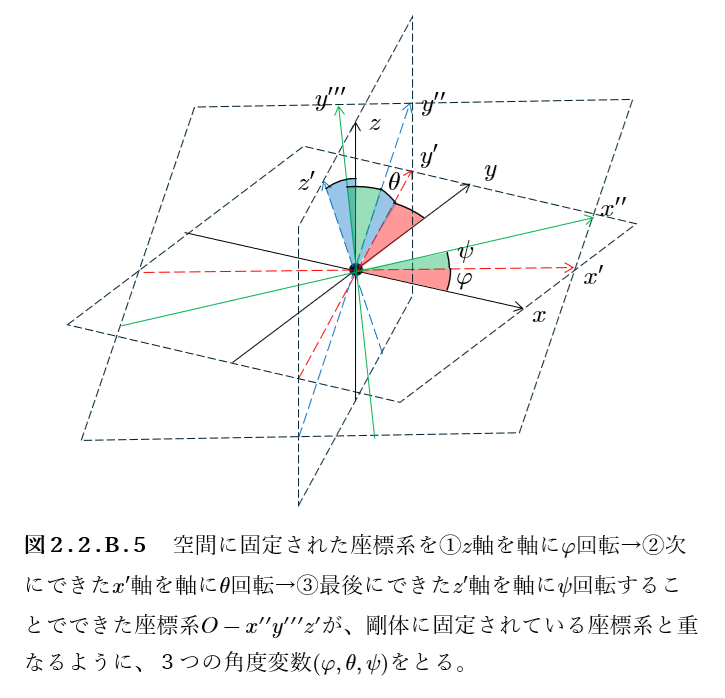
図2.2.B.5のように、空間に固定された座標系を回転させることでできた座標系\(O-x′′y′′′z′\)が、剛体に固定されている座標系と重なるような3つの角度変数\((\phi,\theta,\psi)\)について、この角度変数の組をオイラー角と定義する。
なお、本稿ではオイラー角を\(zxz\)の順で回転軸を選んで定義しましたが、\(xyz\)としたり、\(yzy\)としたり、計12個の選び方がありその定義によって同じ回転を表す場合でもオイラー角は異なります。
定理2.2.B.6
慣性主軸\(O-\mathcal{X} \mathcal{Y} \mathcal{Z}\)の各軸周りの角速度\(\omega_{\mathcal{X}},\omega_{\mathcal{Y}},\omega_{\mathcal{Z}}\)は、慣性主軸に対するオイラー角\((\phi,\theta,\psi)\)を用いて
\(\omega_{\mathcal{X}} = \dot{\theta} \cos \psi + \dot{\phi} \sin \psi \sin \theta\), \(\omega_{\mathcal{Y}} = -\dot{\theta} \sin \psi + \dot{\phi} \cos \psi \sin \theta\), \(\omega_{\mathcal{Z}} = \dot{\psi} + \dot{\phi} \cos \theta\)とかける。
定理2.2.B.6の証明
剛体に固定された慣性主軸の基底ベクトルを\({}^t (e_{\mathcal{X}}, e_{\mathcal{Y}}, e_{\mathcal{Z}})\)、空間に固定された直交座標系の基底ベクトルを\({}^t (e_{x}, e_{y}, e_{z})\)とすると、オイラー角の定義より、
$$
\begin{pmatrix} e_{\mathcal{X}} \\ e_{\mathcal{Y}} \\ e_{\mathcal{Z}} \end{pmatrix} = \begin{pmatrix} \cos\psi & \sin\psi & 0 \\ -\sin\psi & \cos\psi & 0 \\ 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} 1 & 0 & 0 \\ 0 & \cos\theta & \sin\theta \\ 0 & -\sin\theta & \cos\theta \end{pmatrix} \begin{pmatrix} \cos\phi & \sin\phi & 0 \\ -\sin\phi & \cos\phi & 0 \\ 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} e_{x} \\ e_{y} \\ e_{z} \end{pmatrix} \qquad \text{(a)}
$$とかくことができる。式にある、それぞれ\(\psi, \theta, \phi\)に関する3つの\(3 \times 3\)行列を順に\(A,B,C\)とすると、いずれも直交行列である。
以下、剛体の重心からの各相対位置を\(\boldsymbol{s}'(t)\)として、\(\frac{d}{dt} \boldsymbol{s}'(t)\)を2通りの方法で表すことを考える。
まず、慣性主軸は重心を原点においているため、定数\(\mathcal{X}, \mathcal{Y}, \mathcal{Z}\)に対して\(\boldsymbol{s}’ = \mathcal{X} \omega_{\mathcal{X}} + \mathcal{Y} \omega_{\mathcal{Y}} + \mathcal{Z} \omega_{\mathcal{Z}} \)とかけることより、
\begin{align}
\frac{d}{dt} \boldsymbol{s}’ &= (\mathcal{X}, \mathcal{Y}, \mathcal{Z}) \frac{d}{dt} \begin{pmatrix} e_{\mathcal{X}} \\ e_{\mathcal{Y}} \\ e_{\mathcal{Z}} \end{pmatrix} = (\mathcal{X}, \mathcal{Y}, \mathcal{Z}) \left\{ \frac{d}{dt}(ABC) \right\} \begin{pmatrix} e_{x} \\ e_{y} \\ e_{z} \end{pmatrix} = (\mathcal{X}, \mathcal{Y}, \mathcal{Z}) \left\{ \dot{A}BC + A \dot{B}C + AB\dot{C} \right\} \begin{pmatrix} e_{x} \\ e_{y} \\ e_{z} \end{pmatrix} \\
&= (\mathcal{X}, \mathcal{Y}, \mathcal{Z}) \left\{ \dot{A} {}^t \! A ABC + A \dot{B} {}^t \! B {}^t \! A ABC + AB\dot{C} {}^t \! C {}^t \! B {}^t \! A ABC \right\} \begin{pmatrix} e_{x} \\ e_{y} \\ e_{z} \end{pmatrix} \\
&= (\mathcal{X}, \mathcal{Y}, \mathcal{Z}) \left\{ \dot{A} {}^t \! A + A \dot{B} {}^t \! B {}^t \! A + AB\dot{C} {}^t \! C {}^t \! B {}^t \! A \right\} \begin{pmatrix} e_{\mathcal{X}} \\ e_{\mathcal{Y}} \\ e_{\mathcal{Z}} \end{pmatrix} \\
&= (\mathcal{X}, \mathcal{Y}, \mathcal{Z}) \begin{pmatrix} 0 & \dot{\psi} + \dot{\phi}\cos\theta & \dot{\theta}\sin\psi – \dot{\phi}\sin\theta\cos\psi \\ -\dot{\psi} – \dot{\phi}\cos\theta & 0 & \dot{\theta}\cos\psi + \dot{\phi}\sin\theta\sin\psi \\ -\dot{\theta}\sin\psi + \dot{\phi}\sin\theta\cos\psi & -\dot{\theta}\cos\psi – \dot{\phi}\sin\theta\sin\psi & 0 \end{pmatrix} \begin{pmatrix} e_{\mathcal{X}} \\ e_{\mathcal{Y}} \\ e_{\mathcal{Z}} \end{pmatrix} \qquad \text{(b)} \\
\end{align}とかける。ただし、2つ目の等号と5つ目の等号は(a)式を、4つめの等号は行列\(A,B,C\)が直交行列であることを用いている。6つ目の等号はただ行列\(\dot{A} {}^t \! A + A \dot{B} {}^t \! B {}^t \! A + AB\dot{C} {}^t \! C {}^t \! B {}^t \! A\)を計算しただけである。一方で、定理2.2.B.2の証明において扱ったように、\(\frac{d}{dt} \boldsymbol{s}’ = \boldsymbol{\omega} \times \boldsymbol{s}’\)であるので、
$$
\frac{d}{dt} \boldsymbol{s}’ = (\omega_{\mathcal{X}},\omega_{\mathcal{Y}},\omega_{\mathcal{Z}}) \begin{pmatrix} e_{\mathcal{X}} \\ e_{\mathcal{Y}} \\ e_{\mathcal{Z}} \end{pmatrix} \times (\mathcal{X}, \mathcal{Y}, \mathcal{Z}) \begin{pmatrix} e_{\mathcal{X}} \\ e_{\mathcal{Y}} \\ e_{\mathcal{Z}} \end{pmatrix} = (\mathcal{X}, \mathcal{Y}, \mathcal{Z}) \begin{pmatrix} 0 & \omega_{\mathcal{Z}} & -\omega_{\mathcal{Y}} \\ -\omega_{\mathcal{Z}} & 0 & \omega_{\mathcal{X}} \\ \omega_{\mathcal{Y}} & -\omega_{\mathcal{X}} & 0 \end{pmatrix} \begin{pmatrix} e_{\mathcal{X}} \\ e_{\mathcal{Y}} \\ e_{\mathcal{Z}} \end{pmatrix} \qquad \text{(c)}
$$ともかける。この(b)式と(c)式の表現を比較すると直ちに示される。□
自由な剛体の運動方程式
自由な剛体のオイラー=ラグランジュ方程式
さて、剛体の姿勢を表す3つの角度変数で、\(\omega_{\mathcal{X}},\omega_{\mathcal{Y}},\omega_{\mathcal{Z}}\)を表すことができたので、ついに運動エネルギー\(K\)を剛体の位置と姿勢を表す独立な6変数のみでかくことができます。\(K=\frac{1}{2} M{\dot{\boldsymbol{r}}_G}^2 + \frac{1}{2} \left( \mathcal{I}_{\mathcal{X} \mathcal{X}} {\omega_{\mathcal{X}}}^2 + \mathcal{I}_{\mathcal{Y} \mathcal{Y}} {\omega_{\mathcal{Y}}}^2 +
\mathcal{I}_{\mathcal{Z} \mathcal{Z}} {\omega_{\mathcal{Z}}}^2 \right)\)に定理2.2.B.6の結果を代入して、
$$
K=\frac{1}{2} M{\dot{\boldsymbol{r}}_G}^2 + \frac{1}{2} \left( \mathcal{I}_{\mathcal{X} \mathcal{X}} (\dot{\theta} \cos \psi + \dot{\phi} \sin \psi \sin \theta)^2 + \mathcal{I}_{\mathcal{Y} \mathcal{Y}} (-\dot{\theta} \sin \psi + \dot{\phi} \cos \psi \sin \theta)^2 +
\mathcal{I}_{\mathcal{Z} \mathcal{Z}} (\dot{\psi} + \dot{\phi} \cos \theta)^2 \right)
$$となりました。さて、これが今回の自由な剛体の運動におけるラグランジアンで、6変数\((x_G,y_G,z_G,\phi, \theta, \psi)\)に対して、オイラー=ラグランジュ方程式を計算できます。それぞれ以下のようになります。
定理2.2.B.7
自由な剛体の運動において、剛体の全質量を\(M\)、剛体の重心の座標を\((x_G,y_G,z_G)\)、慣性主軸に対する慣性テンソルの対角成分を\(\mathcal{I}_{\mathcal{X}\mathcal{X}}, \mathcal{I}_{\mathcal{Y}\mathcal{Y}}, \mathcal{I}_{\mathcal{Z}\mathcal{Z}}\)、慣性主軸\(O-\mathcal{X} \mathcal{Y} \mathcal{Z}\)の各軸周りの角速度を\(\omega_{\mathcal{X}},\omega_{\mathcal{Y}},\omega_{\mathcal{Z}}\)、慣性主軸に対して定理2.2.B.5で定義したオイラー角を\((\phi,\theta,\psi)\)とすると、以下6式が成り立つ。
$$
\frac{\partial L}{\partial x_G} – \frac{d}{dt}\left(\frac{\partial L}{\partial \dot{x}_G}\right) = 0 – \frac{d}{dt}(M \dot{x}_G) = -M \ddot{x}_G = 0
$$$$
\frac{\partial L}{\partial y_G} – \frac{d}{dt}\left(\frac{\partial L}{\partial \dot{y}_G}\right) = 0 – \frac{d}{dt}(M \dot{y}_G) = -M \ddot{y}_G = 0
$$$$
\frac{\partial L}{\partial z_G} – \frac{d}{dt}\left(\frac{\partial L}{\partial \dot{z}_G}\right) = 0 – \frac{d}{dt}(M \dot{z}_G) = -M \ddot{z}_G = 0
$$\begin{align}
\frac{\partial L}{\partial \phi} – \frac{d}{dt}\left( \frac{\partial L}{\partial \dot{\phi}} \right) &= -\frac{d}{dt}\left( \frac{\partial L}{\partial \omega_{\mathcal{X}}} \frac{\partial \omega_{\mathcal{X}}}{\partial \dot{\phi}} + \frac{\partial L}{\partial \omega_{\mathcal{Y}}} \frac{\partial \omega_{\mathcal{Y}}}{\partial \dot{\phi}} + \frac{\partial L}{\partial \omega_{\mathcal{Z}}} \frac{\partial \omega_{\mathcal{Z}}}{\partial \dot{\phi}} \right) \\[1.5ex]
& = \sin \theta \sin \psi \{ \mathcal{I}_{\mathcal{X}\mathcal{X}}\dot{\omega}_{\mathcal{X}} – (\mathcal{I}_{\mathcal{Y}\mathcal{Y}} – \mathcal{I}_{\mathcal{Z}\mathcal{Z}})\omega_{\mathcal{Y}}\omega_{\mathcal{Z}} \} + \sin \theta \cos \psi \{ \mathcal{I}_{\mathcal{Y}\mathcal{Y}} \dot{\omega}_{\mathcal{Y}} – (\mathcal{I}_{\mathcal{Z}\mathcal{Z}} – \mathcal{I}_{\mathcal{X}\mathcal{X}}) \omega_{\mathcal{Z}} \omega_{\mathcal{X}} \} \\[1.5ex]
&\quad + \cos \theta \{ \mathcal{I}_{\mathcal{Z}\mathcal{Z}} \dot{\omega}_{\mathcal{Z}} – (\mathcal{I}_{\mathcal{X}\mathcal{X}} – \mathcal{I}_{\mathcal{Y}\mathcal{Y}}) \omega_{\mathcal{X}} \omega_{\mathcal{Y}} \} = 0
\end{align} \begin{align}
\frac{\partial L}{\partial \theta} – \frac{d}{dt}\left( \frac{\partial L}{\partial \dot{\theta}} \right) &= \left( \frac{\partial L}{\partial \omega_{\mathcal{X}}}\frac{\partial \omega_{\mathcal{X}}}{\partial \theta} + \frac{\partial L}{\partial \omega_{\mathcal{Y}}}\frac{\partial \omega_{\mathcal{Y}}}{\partial \theta} + \frac{\partial L}{\partial \omega_{\mathcal{Z}}}\frac{\partial \omega_{\mathcal{Z}}}{\partial \theta} \right) – \frac{d}{dt}\left( \frac{\partial L}{\partial \omega_{\mathcal{X}}} \frac{\partial \omega_{\mathcal{X}}}{\partial \dot{\theta}} + \frac{\partial L}{\partial \omega_{\mathcal{Y}}} \frac{\partial \omega_{\mathcal{Y}}}{\partial \dot{\theta}} \right) \\[1.5ex]
&= \sin\psi \left\{ \mathcal{I}_{\mathcal{Y}\mathcal{Y}} \dot{\omega}_{\mathcal{Y}} – (\mathcal{I}_{\mathcal{Z}\mathcal{Z}} – \mathcal{I}_{\mathcal{X}\mathcal{X}}) \omega_{\mathcal{Z}} \omega_{\mathcal{X}} \right\} – \cos\psi \left\{ \mathcal{I}_{\mathcal{X}\mathcal{X}} \dot{\omega}_{\mathcal{X}} – (\mathcal{I}_{\mathcal{Y}\mathcal{Y}} – \mathcal{I}_{\mathcal{Z}\mathcal{Z}}) \omega_{\mathcal{Y}} \omega_{\mathcal{Z}} \right\} = 0
\end{align} $$
\frac{\partial L}{\partial \psi} – \frac{d}{dt}\left( \frac{\partial L}{\partial \dot{\psi}} \right) = \frac{\partial L}{\partial \omega_{\mathcal{X}}}\frac{\partial \omega_{\mathcal{X}}}{\partial \psi} + \frac{\partial L}{\partial \omega_{\mathcal{Y}}}\frac{\partial \omega_{\mathcal{Y}}}{\partial \psi} – \frac{d}{dt}\left( \frac{\partial L}{\partial \omega_{\mathcal{Z}}} \frac{\partial \omega_{\mathcal{Z}}}{\partial \dot{\psi}} \right) = (\mathcal{I}_{\mathcal{X}\mathcal{X}} – \mathcal{I}_{\mathcal{Y}\mathcal{Y}}) \omega_{\mathcal{X}} \omega_{\mathcal{Y}} – \mathcal{I}_{\mathcal{Z}\mathcal{Z}} \dot{\omega_{\mathcal{Z}}} = 0
$$
系2.2.B.8(オイラーの運動方程式)
自由な剛体の運動において、慣性主軸に対する慣性テンソルの対角成分を\(\mathcal{I}_{\mathcal{X}\mathcal{X}}, \mathcal{I}_{\mathcal{Y}\mathcal{Y}}, \mathcal{I}_{\mathcal{Z}\mathcal{Z}}\)、慣性主軸\(O-\mathcal{X} \mathcal{Y} \mathcal{Z}\)の各軸周りの角速度を\(\omega_{\mathcal{X}},\omega_{\mathcal{Y}},\omega_{\mathcal{Z}}\)とすると、以下3式が成り立つ。
$$
\mathcal{I}_{\mathcal{Z}\mathcal{Z}} \dot{\omega}_{\mathcal{Z}} = (\mathcal{I}_{\mathcal{X}\mathcal{X}} – \mathcal{I}_{\mathcal{Y}\mathcal{Y}}) \omega_{\mathcal{X}} \omega_{\mathcal{Y}}
$$$$
\mathcal{I}_{\mathcal{X}\mathcal{X}} \dot{\omega}_{\mathcal{X}} = (\mathcal{I}_{\mathcal{Y}\mathcal{Y}} – \mathcal{I}_{\mathcal{Z}\mathcal{Z}}) \omega_{\mathcal{Y}} \omega_{\mathcal{Z}}
$$$$
\mathcal{I}_{\mathcal{Y}\mathcal{Y}} \dot{\omega}_{\mathcal{Y}} = (\mathcal{I}_{\mathcal{Z}\mathcal{Z}} – \mathcal{I}_{\mathcal{X}\mathcal{X}}) \omega_{\mathcal{Z}} \omega_{\mathcal{X}}
$$
系2.2.B.8の証明
煩雑にならないように、オイラーの運動方程式の左辺をそれぞれ
$$
E_{\mathcal{X}} = \mathcal{I}_{\mathcal{X}\mathcal{X}} \dot{\omega}_{\mathcal{X}} – (\mathcal{I}_{\mathcal{Y}\mathcal{Y}} – \mathcal{I}_{\mathcal{Z}\mathcal{Z}}) \omega_{\mathcal{Y}} \omega_{\mathcal{Z}}
$$$$
E_{\mathcal{Y}} = \mathcal{I}_{\mathcal{Y}\mathcal{Y}} \dot{\omega}_{\mathcal{Y}} – (\mathcal{I}_{\mathcal{Z}\mathcal{Z}} – \mathcal{I}_{\mathcal{X}\mathcal{X}}) \omega_{\mathcal{Z}} \omega_{\mathcal{X}}
$$$$
E_{\mathcal{Z}} = \mathcal{I}_{\mathcal{Z}\mathcal{Z}} \dot{\omega}_{\mathcal{Z}} – (\mathcal{I}_{\mathcal{X}\mathcal{X}} – \mathcal{I}_{\mathcal{Y}\mathcal{Y}}) \omega_{\mathcal{X}} \omega_{\mathcal{Y}}
$$とおいて、\(E_{\mathcal{X}} = E_{\mathcal{Y}} = E_{\mathcal{Z}}=0\)が成り立つことを示す。定理2.2.B.7の第4式、第5式、第6式はそれぞれ、\(\sin\theta \sin\psi E_{\mathcal{X}} + \sin\theta \cos\psi E_{\mathcal{Y}} + \cos\theta E_{\mathcal{Z}} = 0\), \(\sin\psi E_{\mathcal{Y}} – \cos\psi E_{\mathcal{X}} = 0\), \(-E_{\mathcal{Z}} = 0\)と書き換えることができるので、第6式より直ちに\(E_{\mathcal{Z}} = 0\)は示される。続いて、第4式の両辺を\(\sin\theta \neq 0\)で割ると、\(\sin\psi E_{\mathcal{X}} + \cos\psi E_{\mathcal{Y}} = 0\)となり、第4式と第5式の連立方程式を以下のように行列の形式で書き直すことができる。
$$
\begin{pmatrix} -\cos\psi & \sin\psi \\ \sin\psi & \cos\psi \end{pmatrix} \begin{pmatrix} E_{\mathcal{X}} \\ E_{\mathcal{Y}} \end{pmatrix} = \begin{pmatrix} 0 \\ 0 \end{pmatrix}
$$この左側の行列の行列式は\(-\cos^2\psi – \sin^2\psi = -1 \neq 0\)であるので、逆行列が存在し、この連立方程式の解は自明な解\({}^t (E_{\mathcal{X}},E_{\mathcal{Y}} ) = {}^t (0,0)\)しか存在しないため、\(E_{\mathcal{X}} = E_{\mathcal{Y}} = 0\)も示された。□
以上より、自由な剛体の運動を記述する方程式はこの6式
$$
\frac{\partial L}{\partial x_G} – \frac{d}{dt}\left(\frac{\partial L}{\partial \dot{x}_G}\right) = 0 – \frac{d}{dt}(M \dot{x}_G) = -M \ddot{x}_G = 0
$$$$
\frac{\partial L}{\partial y_G} – \frac{d}{dt}\left(\frac{\partial L}{\partial \dot{y}_G}\right) = 0 – \frac{d}{dt}(M \dot{y}_G) = -M \ddot{y}_G = 0
$$$$
\frac{\partial L}{\partial z_G} – \frac{d}{dt}\left(\frac{\partial L}{\partial \dot{z}_G}\right) = 0 – \frac{d}{dt}(M \dot{z}_G) = -M \ddot{z}_G = 0
$$$$
\mathcal{I}_{\mathcal{Z}\mathcal{Z}} \dot{\omega}_{\mathcal{Z}} = (\mathcal{I}_{\mathcal{X}\mathcal{X}} – \mathcal{I}_{\mathcal{Y}\mathcal{Y}}) \omega_{\mathcal{X}} \omega_{\mathcal{Y}}
$$$$
\mathcal{I}_{\mathcal{X}\mathcal{X}} \dot{\omega}_{\mathcal{X}} = (\mathcal{I}_{\mathcal{Y}\mathcal{Y}} – \mathcal{I}_{\mathcal{Z}\mathcal{Z}}) \omega_{\mathcal{Y}} \omega_{\mathcal{Z}}
$$$$
\mathcal{I}_{\mathcal{Y}\mathcal{Y}} \dot{\omega}_{\mathcal{Y}} = (\mathcal{I}_{\mathcal{Z}\mathcal{Z}} – \mathcal{I}_{\mathcal{X}\mathcal{X}}) \omega_{\mathcal{Z}} \omega_{\mathcal{X}}
$$に整理されました。上の3式は剛体の並進運動を表していて、外力を受けない場合においては剛体の重心は静止あるいは等速直線運動をします。下の3式は剛体の回転運動を表していて、この解を初等関数で解くことはできませんが、特殊関数を用いて厳密な解析解が得られるので見ていきましょう。
オイラーの運動方程式の解
さて、物理学において非線形微分方程式を解析的に解くときに非常に重要になるのが、保存則です。保存則を見つけることで、方程式の階数が1つ下がることになり、非線形方程式が一気に扱いやすくなることが非常に多いので、見ていきましょう。
保存量の見当のつけ方は、この稿で考えたように、基本的にはネーターの定理や対称性を中心に考えます。どういう変換をしてもラグランジアンが保存しそうか、に注目するといいですね。具体的には系2.2.9、系2.2.10、系2.2.11あたりを使っていきます。なお、剛体のラグランジアンは、
\begin{align*}
& L(\boldsymbol{r}_G,\phi,\theta,\psi,\dot{\boldsymbol{r}_G},\dot{\phi},\dot{\theta},\dot{\psi})=\int_\mathcal{V} \left\{ \frac{1}{2} \rho(\boldsymbol{s}) |\dot{\boldsymbol{r}}(\boldsymbol{s}, t)|^2 \right\} d\mathcal{V} \\ &= \frac{1}{2} M{\dot{\boldsymbol{r}}_G}^2 + \frac{1}{2} \left( \mathcal{I}_{\mathcal{X} \mathcal{X}} (\dot{\theta} \cos \psi + \dot{\phi} \sin \psi \sin \theta)^2 + \mathcal{I}_{\mathcal{Y} \mathcal{Y}} (-\dot{\theta} \sin \psi + \dot{\phi} \cos \psi \sin \theta)^2 +
\mathcal{I}_{\mathcal{Z} \mathcal{Z}} (\dot{\psi} + \dot{\phi} \cos \theta)^2 \right)
\end{align*}であることに注意してください。
系2.2.B.9
自由な剛体の運動において、並進運動のエネルギー\(\frac{1}{2} M \left( {x_G}^2 + {y_G}^2 +{z_G}^2 \right)\)が時間変化に対して保存する。
系2.2.B.9の証明
力学系のラグランジアン
$$
L(\boldsymbol{r}_G,\phi,\theta,\psi,\dot{\boldsymbol{r}_G},\dot{\phi},\dot{\theta},\dot{\psi})=\frac{1}{2} M{\dot{\boldsymbol{r}}_G}^2 + \frac{1}{2} \left( \mathcal{I}_{\mathcal{X} \mathcal{X}} (\dot{\theta} \cos \psi + \dot{\phi} \sin \psi \sin \theta)^2 + \mathcal{I}_{\mathcal{Y} \mathcal{Y}} (-\dot{\theta} \sin \psi + \dot{\phi} \cos \psi \sin \theta)^2 +
\mathcal{I}_{\mathcal{Z} \mathcal{Z}} (\dot{\psi} + \dot{\phi} \cos \theta)^2 \right)
$$は、\(x_G,y_G,z_G\)を含まないため、\(x_G,y_G,z_G\)方向の無限小変換\(x_G \to x_G + \epsilon, y_G \to y_G + \epsilon, z_G \to z_G + \epsilon \)に対して不変であるから、系2.2.9の結果より、以下3つの物理量
$$
\frac{\partial L}{\partial \dot{x_G}} = M \dot{x_G} \qquad
\frac{\partial L}{\partial \dot{y_G}} = M \dot{y_G} \qquad
\frac{\partial L}{\partial \dot{z_G}} = M \dot{z_G}
$$が保存する。これより\(\frac{1}{2M} \left( \{ M \dot{x_G} \}^2 + \{ M \dot{y_G} \}^2 + \{ M \dot{z_G} \}^2 \right) = \frac{1}{2} M \left( {x_G}^2 + {y_G}^2 +{z_G}^2 \right) \)も保存するため、示された。□
系2.2.B.10
自由な剛体の運動において、回転運動のエネルギー\(\frac{1}{2} \left( \mathcal{I}_{\mathcal{X} \mathcal{X}} {\omega_{\mathcal{X}}}^2 + \mathcal{I}_{\mathcal{Y} \mathcal{Y}} {\omega_{\mathcal{Y}}}^2 +
\mathcal{I}_{\mathcal{Z} \mathcal{Z}} {\omega_{\mathcal{Z}}}^2 \right)\)が時間変化に対して保存する。
系2.2.B.10の証明
力学系のラグランジアン
$$
L(\boldsymbol{r}_G,\phi,\theta,\psi,\dot{\boldsymbol{r}_G},\dot{\phi},\dot{\theta},\dot{\psi})=\frac{1}{2} M{\dot{\boldsymbol{r}}_G}^2 + \frac{1}{2} \left( \mathcal{I}_{\mathcal{X} \mathcal{X}} (\dot{\theta} \cos \psi + \dot{\phi} \sin \psi \sin \theta)^2 + \mathcal{I}_{\mathcal{Y} \mathcal{Y}} (-\dot{\theta} \sin \psi + \dot{\phi} \cos \psi \sin \theta)^2 +
\mathcal{I}_{\mathcal{Z} \mathcal{Z}} (\dot{\psi} + \dot{\phi} \cos \theta)^2 \right)
$$は、時間を直接の変数として含まないため、系2.2.10の結果より、以下の量が保存する。
$$
\frac{\partial L}{\partial \dot{x_G}} \dot{x_G} + \frac{\partial L}{\partial \dot{y_G}} \dot{y_G} + \frac{\partial L}{\partial \dot{z_G}} \dot{z_G} + \frac{\partial L}{\partial \dot{\phi}} \dot{\phi} + \frac{\partial L}{\partial \dot{\theta}} \dot{\theta} + \frac{\partial L}{\partial \dot{\psi}} \dot{\psi} – L = L = \frac{1}{2} M \left( {x_G}^2 + {y_G}^2 +{z_G}^2 \right) + \frac{1}{2} \left( \mathcal{I}_{\mathcal{X} \mathcal{X}} {\omega_{\mathcal{X}}}^2 + \mathcal{I}_{\mathcal{Y} \mathcal{Y}} {\omega_{\mathcal{Y}}}^2 +
\mathcal{I}_{\mathcal{Z} \mathcal{Z}} {\omega_{\mathcal{Z}}}^2 \right)
$$ただし、1つ目の等号はかなりの計算を省略している。ここで、系2.2.B.9より、並進運動のエネルギー\(\frac{1}{2} M \left( {x_G}^2 + {y_G}^2 +{z_G}^2 \right)\)が時間変化に対して保存する。これより、\(L- \frac{1}{2} M \left( {x_G}^2 + {y_G}^2 +{z_G}^2 \right) = \frac{1}{2} \left( \mathcal{I}_{\mathcal{X} \mathcal{X}} {\omega_{\mathcal{X}}}^2 + \mathcal{I}_{\mathcal{Y} \mathcal{Y}} {\omega_{\mathcal{Y}}}^2 +
\mathcal{I}_{\mathcal{Z} \mathcal{Z}} {\omega_{\mathcal{Z}}}^2 \right)\)も保存するため、示された。□
系2.2.B.11
自由な剛体の運動において、角運動量の大きさの2乗\(\mathcal{I}_{\mathcal{X}\mathcal{X}}^2\omega_{\mathcal{X}}^2 + \mathcal{I}_{\mathcal{Y}\mathcal{Y}}^2\omega_{\mathcal{Y}}^2 + \mathcal{I}_{\mathcal{Z}\mathcal{Z}}^2\omega_{\mathcal{Z}}^2\)が時間変化に対して保存する。
系2.2.B.11の証明
力学系のラグランジアン
$$
L(\boldsymbol{r}_G,\phi,\theta,\psi,\dot{\boldsymbol{r}_G},\dot{\phi},\dot{\theta},\dot{\psi})=\frac{1}{2} M{\dot{\boldsymbol{r}}_G}^2 + \frac{1}{2} \left( \mathcal{I}_{\mathcal{X} \mathcal{X}} (\dot{\theta} \cos \psi + \dot{\phi} \sin \psi \sin \theta)^2 + \mathcal{I}_{\mathcal{Y} \mathcal{Y}} (-\dot{\theta} \sin \psi + \dot{\phi} \cos \psi \sin \theta)^2 +
\mathcal{I}_{\mathcal{Z} \mathcal{Z}} (\dot{\psi} + \dot{\phi} \cos \theta)^2 \right)
$$は、\(\phi\)を含まないため、\(\phi\)方向の無限小変換\(\phi \to \phi + \epsilon \)に対して不変であるから、系2.2.9の結果より、\(\frac{\partial L}{\partial \dot{\phi}}\)は保存する。先の稿で示しているように、\(\phi\)は空間固定座標系の\(z\)軸回りの回転角として定義されているため、これに共役な運動量である\(\frac{\partial L}{\partial \dot{\phi}}\)は全角運動量ベクトルの\(z\)軸成分に他ならない。
さて、ここで剛体は外力のない自由空間に存在するため、系の空間の等方性より、空間固定座標系 \(O-xyz\)の\(z\)軸を空間のどの方向に向けて定義したとしてもラグランジアンの表式は全く変わらない。したがって、ある任意の軸を\(z\)軸として選んだとき、その軸回りの角運動量が保存するということは、空間のあらゆる方向の軸回りの角運動量が保存するということを意味する。これより、空間固定座標系における角運動量ベクトルが定ベクトルであるから、その大きさの2乗\(\mathcal{I}_{\mathcal{X}\mathcal{X}}^2\omega_{\mathcal{X}}^2 + \mathcal{I}_{\mathcal{Y}\mathcal{Y}}^2\omega_{\mathcal{Y}}^2 + \mathcal{I}_{\mathcal{Z}\mathcal{Z}}^2\omega_{\mathcal{Z}}^2\)も保存する。これより、示された。□
このようにネーターの定理や対称性から保存量を次々と見つけてくることができます。なお、系2.2.B.11の証明については、力学系の空間回転対称性を根拠にして、系2.2.11の結果を利用してもかまいません。
さて、では最後にこれをもとに厳密な解析解を書いてみましょう。
系2.2.B.12
オイラーの運動方程式の厳密な解析解\(\omega_{\mathcal{X}},\omega_{\mathcal{Y}},\omega_{\mathcal{Z}}\)は、以下の積分の結果である(初等関数ではこれ以上書けないが、これで十分である)。ただし、\(A,B,C,D,A’,B’,C’,D’,A”,B”,C”,D”\)は初期条件で決まる定数である。
$$
t = \int \frac{\mathcal{I}_{\mathcal{Z}\mathcal{Z}}}{(\mathcal{I}_{\mathcal{X}\mathcal{X}} – \mathcal{I}_{\mathcal{Y}\mathcal{Y}}) \sqrt{A – B \omega_{\mathcal{Z}}^2} \sqrt{C – D \omega_{\mathcal{Z}}^2}} d\omega_{\mathcal{Z}}
$$$$
t = \int \frac{\mathcal{I}_{\mathcal{X}\mathcal{X}}}{(\mathcal{I}_{\mathcal{Y}\mathcal{Y}} – \mathcal{I}_{\mathcal{Z}\mathcal{Z}}) \sqrt{A’ – B’ \omega_{\mathcal{X}}^2} \sqrt{C’ – D’ \omega_{\mathcal{X}}^2}} d\omega_{\mathcal{X}}
$$$$
t = \int \frac{\mathcal{I}_{\mathcal{Y}\mathcal{Y}}}{(\mathcal{I}_{\mathcal{Z}\mathcal{Z}} – \mathcal{I}_{\mathcal{X}\mathcal{X}}) \sqrt{A” – B” \omega_{\mathcal{Y}}^2} \sqrt{C” – D” \omega_{\mathcal{Y}}^2}} d\omega_{\mathcal{Y}}
$$
系2.2.B.12の証明
系2.2.B.10、系2.2.B.11より、定数\(E, L\)を用いて、
$$
2E = \mathcal{I}_{\mathcal{X}\mathcal{X}} \omega_{\mathcal{X}}^2 + \mathcal{I}_{\mathcal{Y}\mathcal{Y}} \omega_{\mathcal{Y}}^2 + \mathcal{I}_{\mathcal{Z}\mathcal{Z}} \omega_{\mathcal{Z}}^2
$$$$
L^2 = \mathcal{I}_{\mathcal{X}\mathcal{X}}^2 \omega_{\mathcal{X}}^2 + \mathcal{I}_{\mathcal{Y}\mathcal{Y}}^2 \omega_{\mathcal{Y}}^2 + \mathcal{I}_{\mathcal{Z}\mathcal{Z}}^2 \omega_{\mathcal{Z}}^2
$$とかくことができ、この2式から\(\omega_{\mathcal{X}}^2, \omega_{\mathcal{Y}}^2\)を消去して、\(\omega_{\mathcal{Z}}\)を求めると、改めて定数を\(A,B,C,D\)とおいて\(\omega_{\mathcal{X}}^2 = A – B \omega_{\mathcal{Z}}^2, \omega_{\mathcal{Y}}^2 = C – D \omega_{\mathcal{Z}}^2\)とかける。オイラーの運動方程式の\(\mathcal{I}_{\mathcal{Z}\mathcal{Z}} \dot{\omega}_{\mathcal{Z}} = (\mathcal{I}_{\mathcal{X}\mathcal{X}} – \mathcal{I}_{\mathcal{Y}\mathcal{Y}}) \omega_{\mathcal{X}} \omega_{\mathcal{Y}}\)にこれを代入して整理すると、
$$
\mathcal{I}_{\mathcal{Z}\mathcal{Z}} \frac{d {\omega}_{\mathcal{Z}}}{dt} = (\mathcal{I}_{\mathcal{X}\mathcal{X}} – \mathcal{I}_{\mathcal{Y}\mathcal{Y}}) \sqrt{A – B \omega_{\mathcal{Z}}^2} \sqrt{C – D \omega_{\mathcal{Z}}^2}
$$となるが、これは変数分離型の微分方程式より解くことができ、
$$
t = \int \frac{\mathcal{I}_{\mathcal{Z}\mathcal{Z}}}{(\mathcal{I}_{\mathcal{X}\mathcal{X}} – \mathcal{I}_{\mathcal{Y}\mathcal{Y}}) \sqrt{A – B \omega_{\mathcal{Z}}^2} \sqrt{C – D \omega_{\mathcal{Z}}^2}} d\omega_{\mathcal{Z}}
$$となる。\(\omega_{\mathcal{X}},\omega_{\mathcal{Y}}\)についても同様に示される。□
以上、外力の働かない剛体の運動を例題として、ラグランジュ力学のやり方で厳密な解析解を求めてみました。
コメント