
こんにちは、turtleです。現在電磁気学を学んでおりまして、その備忘録のような形でこのブログを書かせていただいております。基本的に大学の内容となっていますが、数式さえ乗り越えれば高校生でも理解できると思っていますので、どうぞよろしくお願いいたします。
本稿で扱うのは、”拘束のある”力学系におけるラグランジュ力学です。
\(N\)次元の力学系について\(x_1,x_2,…,x_N\)がそれぞれ独立に、かつ無制限に動くことができるときは、系の粒子の位置を指定するために\(N\)個の変数を必要とします。その一方で、変数の間に関係式として\(G(x_1,x_2,…,x_N,t)=0\)のようなものが存在するときは、系の粒子の位置を指定するために必要な変数が減ることになりますよね。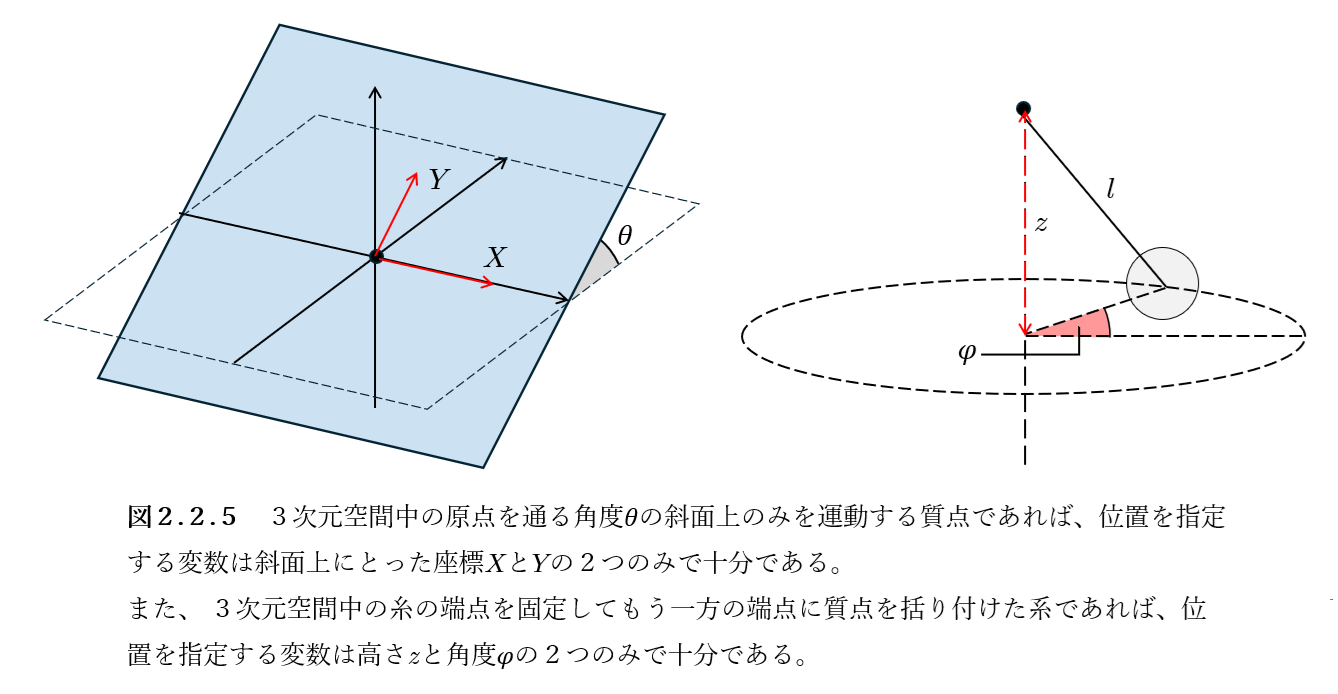
例えば、図2.2.5の台の上を転がる運動であれば、質点の位置を表す直交座標\(x,y,z\)が\(z=x \tan \theta\)という関係式を満たしており、このために質点の位置は2変数で与えられることになります。
図2.2.5の糸につながった運動でも、質点の位置を表す円筒座標\(\rho,\phi,z\)が\(\rho=l\)という関係式を満たしており、このために質点の位置は2変数でかけば済むことになります。
こういうように、系の粒子の位置を表す変数が等式\(G(x_1,x_2,…,x_N,t)=0\)によって制限されているときに”拘束がある”と表現します。正確には、現実の力学系においては不等式による拘束や、等式が変数の時間微分を含んでかかれる拘束などもありますが、簡単のため本稿では、位置を表す変数間の等式による拘束(ホロノミックな拘束)のみを扱うことにします。
ホロノミック拘束条件の扱い方
未定乗数をとる方法
定理2.2.5
力学系の一般化座標を\(\boldsymbol{q}=(q_1,q_2,…,q_N)\)としたとき、力学系に対応してラグランジアン\(L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t)\)が定まるならば、拘束条件として\(M\)本の式\(G_j(\boldsymbol{q}, t)=0 \quad (j=1,2,…,M)\)を要求するとき、\(i=1,2,…,N\)に対して
$$
\frac{\partial L}{\partial q_i} – \frac{d}{dt} \frac{\partial L}{\partial \dot{q}_i} =\sum_{j=1}^M \lambda_j \frac{\partial G_j}{\partial q_i}
$$を満足するような時間\(t\)の関数の組\(\{\lambda_j(t) \}_{j=1}^M \)が存在する。
定理2.2.5の証明
主張2.2.1(最小作用の原理)より、ラグランジアン\(L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t)\)は現実に力学系が通過する軌道\(\boldsymbol{q}(t)\)に対して、\(S=\int_{t_i}^{t_f} L dt\)の変分\(\delta S\)をゼロにする量として定義されていた。これより、ラグランジアン\(L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t)\)の変分を計算し、主張2.2.1から原理2.2を導く証明のときと同様に\(\delta \dot{q}_i\)の項を部分積分すると、次の式が得られる。
$$
\int_{t_i}^{t_f} \sum_{i=1}^N \left\{ \left( \frac{\partial L}{\partial q_i} – \frac{d}{dt} \frac{\partial L}{\partial \dot{q}_i} \right) \delta q_i \right\} dt =0
$$もし\(N\)個の変数\(q_i\)がすべて互いに独立に動けるのであれば、変分法の基本補題よりカッコの中身がそれぞれ0になり通常のオイラー=ラグランジュ方程式が得られるが、ここでは\(M\)個の拘束条件により各\(\delta q_i\)は独立して動くことができないため、カッコの中身がそれぞれ0とはいえない。ただ、積分の中身について、
$$
\sum_{i=1}^N \left\{ \left( \frac{\partial L}{\partial q_i} – \frac{d}{dt} \frac{\partial L}{\partial \dot{q}_i} \right) \delta q_i \right\} =0 \qquad \text{(a)}
$$であることは成り立つ。ここで、\(\boldsymbol{x}\)として、
$$
\boldsymbol{x}= {}^t \left( \frac{\partial L}{\partial q_1} – \frac{d}{dt} \frac{\partial L}{\partial \dot{q}_1} , \frac{\partial L}{\partial q_2} – \frac{d}{dt} \frac{\partial L}{\partial \dot{q}_2} , … , \frac{\partial L}{\partial q_N} – \frac{d}{dt} \frac{\partial L}{\partial \dot{q}_N} \right)
$$を定義すると、(a)式は\(\boldsymbol{x} \cdot \delta \boldsymbol{q} = 0\)と書き換えることができる。
ここで、系の\(M\)個の拘束条件\(G_j(\boldsymbol{q}, t)=0 \quad (j=1,2,…,M)\)について、軌道が\(\delta q_i\)だけズレた仮想的な経路でも、この拘束条件は満たされていなければならないため、時間を固定して\(G_j\)の変分をとると、
$$
\delta G_j = G_j(\boldsymbol{q} + \delta \boldsymbol{q} , t) – G_j(\boldsymbol{q}, t) = \sum_{i=1}^N \frac{\partial G_j}{\partial q_i} \delta q_i = 0 \qquad (j=1,2,…,M)
$$とならねばならない。これは\(\nabla_{\boldsymbol{q}} G_j \cdot \delta \boldsymbol{q} = 0\)と書き換えることができる。
以上より、\(\nabla_{\boldsymbol{q}} G_j \cdot \delta \boldsymbol{q} = 0\)のもとで自由に動く微小の経路変化\(\delta \boldsymbol{r}\)が、\(\boldsymbol{x} \cdot \delta \boldsymbol{q} = 0\)を満たすような\(\boldsymbol{x}\)の条件さえ求めればよいが、この条件は\(\boldsymbol{x}\)が\(\{ \nabla_{\boldsymbol{q}} G_j \}_{i=1}^N\)によって張られる部分空間の元であること、すなわち、
$$
\boldsymbol{x} = \sum_{j=1}^M \lambda_j \nabla_{\boldsymbol{q}} G_j
$$なる時間\(t\)の関数の組\(\{\lambda_j(t) \}_{j=1}^M \)が存在することである。よって、この各成分をみると示されている。□
ここで、定理2.2.5の式を変形すると、\(G_j(\boldsymbol{q}, t)\)は\(\dot{\boldsymbol{q}}\)を引数に含まないため、
$$
\frac{\partial}{\partial q_i} \left( L-\sum_{j=1}^M \lambda_j G_j \right) – \frac{d}{dt} \frac{\partial}{\partial \dot{q}_i} \left( L-\sum_{j=1}^M \lambda_j G_j \right) = 0
$$と書き換えることができることが分かりますね、つまり、拘束条件があるときは、ラグランジアン\(L\)を\( L-\sum_{j=1}^M \lambda_j G_j \)に置き換えていると見ることもできる、ということです。いずれにしても、
$$
\frac{\partial L}{\partial q_i} – \frac{d}{dt} \frac{\partial L}{\partial \dot{q}_i} =\sum_{j=1}^M \lambda_j \frac{\partial G_j}{\partial q_i} \qquad (i=1,2,…,N)
$$$$
G_j(\boldsymbol{q}, t)=0 \qquad (j=1,2,…,M)
$$という\(N+M\)個の式を立てれば、理論的には\(\{q_i(t)\}_{i=1}^N \), \(\{\lambda_j(t) \}_{j=1}^M \)という\(N+M\)個の変数を求めることができるため、定理2.2.5でもって、ホロノミックな拘束条件が与えられたときの運動は解くことができるといえます。
変数を消去する方法
というように、ここまでホロノミックな拘束条件が与えられたときの運動を解く方法を考えてきましたが、こうは思わなかったでしょうか。例えば、図2.2.5の糸につながった運動であれば、\(-\lambda (\rho-l)\)の項を追加せずとも、そもそもラグランジアン自体に\(\rho=l\)を代入してしまえばよいのではないか、、と。
拘束条件としての\(M\)本の式\(G_j(\boldsymbol{q}, t)=0 \quad (j=1,2,…,M)\)を使うと、\(N\)個の変数は、変数消去によって\(N-M\)個に減らすことができるでしょう。こうしてできた\(N-M\)本のオイラー=ラグランジュ方程式から解いた運動が、先ほどのように未定乗数\(\{\lambda_j(t) \}_{j=1}^M \)をとって解いたときの運動と同じものであることを確認しておきましょう。
定理2.2.6
拘束条件として\(M\)本の式\(G_j(\boldsymbol{q}, t)=0 \quad (j=1,2,…,M)\)を要求するとき、力学系の一般化座標のうち拘束条件を解いて残る変数を\(\boldsymbol{q}=(q_1,q_2,…,q_n)\)、拘束条件を解いて消える変数を\(\boldsymbol{Q}=(Q_1,Q_2,…,Q_M)\)とする(ただし\(N=n+M\))。
ここで、力学系に対応してラグランジアン\(L(\boldsymbol{q}, \dot{\boldsymbol{q}}, \boldsymbol{Q}, \dot{\boldsymbol{Q}}, t)\)が定まるならば、これに\(\boldsymbol{Q}=\boldsymbol{Q}(\boldsymbol{q},t)\), \(\dot{\boldsymbol{Q}}=\dot{\boldsymbol{Q}}(\boldsymbol{q},\dot{\boldsymbol{q}},t)\)を代入して変数を消去した\(\tilde{L}(\boldsymbol{q}, \dot{\boldsymbol{q}},t) = L(\boldsymbol{q}, \dot{\boldsymbol{q}}, \boldsymbol{Q}(\boldsymbol{q},t), \dot{\boldsymbol{Q}}(\boldsymbol{q},\dot{\boldsymbol{q}},t), t)\)に対して、
$$
\frac{\partial \tilde{L}}{\partial q_i} – \frac{d}{dt} \frac{\partial \tilde{L}}{\partial \dot{q}_i} =0 \qquad (i=1,2,…n)
$$を解いて求めた運動は、定理2.2.5により求めた運動と同じものである。
定理2.2.6の証明
先に準備として(a),(b),(c),(d),(e)式を与える。
まず変数消去で消える座標\(Q_k\)は座標\(\boldsymbol{q}\)と時間\(t\)の関数\(Q_k(\boldsymbol{q}, t)\)として表されるので、これを時間で微分すると、速度\(\dot{Q}_k\)は合成関数の微分より、
$$
\dot{Q}_k = \frac{d Q_k}{dt} = \sum_{j=1}^N \frac{\partial Q_k}{\partial q_j} \frac{d q_j}{dt} + \frac{\partial Q_k}{\partial t} \frac{dt}{dt} = \sum_{j=1}^N \frac{\partial Q_k}{\partial q_j}\dot{q}_j + \frac{\partial Q_k}{\partial t}
$$とかける。この\(\dot{Q}_k\)を\(\dot{q}_i\)以外を定数とみなして偏微分すると、\(Q_k\)は\(\boldsymbol{q}\)と時間\(t\)の関数であるため、\(\frac{\partial Q_k}{\partial q_j}\)や\(\frac{\partial Q_k}{\partial t}\)は\(\dot{\boldsymbol{q}}\)を引数に含まないから、合成関数の微分より、
$$
\frac{\partial \dot{Q}_k}{\partial \dot{q}_j} = \frac{\partial}{\partial \dot{q}_j} \left( \sum_{j=1}^N \frac{\partial Q_k}{\partial q_j}\dot{q}_j + \frac{\partial Q_k}{\partial t} \right) = \frac{\partial Q_k}{\partial q_j} \qquad \text{(a)}
$$が成り立つ。続いて、拘束条件\(G_j(\boldsymbol{q}, \boldsymbol{Q}, t) = 0\)を解いて得られた\(\boldsymbol{Q} = \boldsymbol{Q}(\boldsymbol{q}, t)\)を元の式に代入した恒等式\(\tilde{G}_j(\boldsymbol{q}, t) = G_j(\boldsymbol{q}, \boldsymbol{Q}(\boldsymbol{q}, t), t) = 0\)について、この両辺を独立変数\(q_i\)で偏微分すると、合成関数の微分を用いて、
$$
\frac{\partial \tilde{G}_j}{\partial q_i} = \frac{\partial G_j}{\partial q_i} + \sum_{k=1}^M \frac{\partial G_j}{\partial Q_k} \frac{\partial Q_k}{\partial q_i} = 0 \qquad \text{(b)}
$$となる。次に、変数を消去したラグランジアン\(\tilde{L}(\boldsymbol{q}, \dot{\boldsymbol{q}}, t) = L(\boldsymbol{q}, \dot{\boldsymbol{q}}, \boldsymbol{Q}(\boldsymbol{q},t), \dot{\boldsymbol{Q}}(\boldsymbol{q},\dot{\boldsymbol{q}},t), t)\)についても\(q_i\)と \(\dot{q}_i\)でそれぞれ偏微分すると、合成関数の微分を用いて、
$$
\frac{\partial \tilde{L}}{\partial q_i} = \frac{\partial L}{\partial q_i} + \sum_{k=1}^M \left( \frac{\partial L}{\partial Q_k} \frac{\partial Q_k}{\partial q_i} + \frac{\partial L}{\partial \dot{Q}_k} \frac{\partial \dot{Q}_k}{\partial q_i} \right) \qquad \text{(c)}
$$$$
\frac{\partial \tilde{L}}{\partial \dot{q}_i} = \frac{\partial L}{\partial \dot{q}_i} + \sum_{k=1}^M \frac{\partial L}{\partial \dot{Q}_k} \frac{\partial \dot{Q}_k}{\partial \dot{q}_i} = \frac{\partial L}{\partial \dot{q}_i} + \sum_{k=1}^M \frac{\partial L}{\partial \dot{Q}_k} \frac{\partial Q_k}{\partial q_i} \qquad \text{(d)}
$$となる。ただし、(d)式の1つ目の等号は\(\boldsymbol{Q}(\boldsymbol{q},t)\)は速度\(\dot{\boldsymbol{q}}\)には依存しないため、\(\frac{\partial Q_k}{\partial \dot{q}_i}=0\)であること、2つ目の等号は(a)式を用いている。(d)式をさらに時間\(t\)で全微分すると、積の微分公式を用いて、
$$
\frac{d}{dt}\left(\frac{\partial \tilde{L}}{\partial \dot{q}_i}\right) = \frac{d}{dt}\left(\frac{\partial L}{\partial \dot{q}_i}\right) + \sum_{k=1}^M \left[ \frac{d}{dt}\left(\frac{\partial L}{\partial \dot{Q}_k}\right) \frac{\partial Q_k}{\partial q_i} + \frac{\partial L}{\partial \dot{Q}_k} \frac{d}{dt}\left(\frac{\partial Q_k}{\partial q_i}\right) \right] \qquad \text{(e)}
$$となっている。さて、式(a),(b),(c),(d),(e)を与えたので証明に入る。定理2.2.5の式から定理2.2.6の式が矛盾なく出てくることを示す。
定理2.2.5は、すべての変数(\(q_i\)と\(Q_k\))に対して
$$
\frac{\partial L}{\partial q_i} – \frac{d}{dt}\frac{\partial L}{\partial \dot{q}_i} = \sum_{j=1}^M \lambda_j \frac{\partial G_j}{\partial q_i} \qquad \text{(f)}
$$$$
\frac{\partial L}{\partial Q_k} – \frac{d}{dt}\frac{\partial L}{\partial \dot{Q}_k} = \sum_{j=1}^M \lambda_j \frac{\partial G_j}{\partial Q_k} \qquad \text{(g)}
$$が成り立つことを主張している。ここから定理2.2.6の式が矛盾なく出てくることを示すために、(c)式と(e)式を引き算して\(\tilde{L}\)のオイラー=ラグランジュ方程式の左辺を計算すると、
$$
\frac{\partial \tilde{L}}{\partial q_i} – \frac{d}{dt}\left(\frac{\partial \tilde{L}}{\partial \dot{q}_i}\right) = \left( \frac{\partial L}{\partial q_i} – \frac{d}{dt}\frac{\partial L}{\partial \dot{q}_i} \right) + \sum_{k=1}^M \left( \frac{\partial L}{\partial Q_k} – \frac{d}{dt}\frac{\partial L}{\partial \dot{Q}_k} \right) \frac{\partial Q_k}{\partial q_i}
$$となる。右辺に(f)式と(g)式を代入することで、
$$
\frac{\partial \tilde{L}}{\partial q_i} – \frac{d}{dt}\left(\frac{\partial \tilde{L}}{\partial \dot{q}_i}\right) = \sum_{j=1}^M \lambda_j \frac{\partial G_j}{\partial q_i} + \sum_{k=1}^M \left( \sum_{j=1}^M \lambda_j \frac{\partial G_j}{\partial Q_k} \right) \frac{\partial Q_k}{\partial q_i} = \sum_{j=1}^M \lambda_j \left[ \frac{\partial G_j}{\partial q_i} + \sum_{k=1}^M \frac{\partial G_j}{\partial Q_k} \frac{\partial Q_k}{\partial q_i} \right] = 0
$$となっている。ただし、3つ目の等号は(b)式を用いた。これは定理2.2.6の\(\tilde{L}\)のオイラー=ラグランジュ方程式そのものであるから、示された。□
2つ方法を確認したのはどちらも得手と不得手があるからです。簡単な拘束条件ならば変数を消去した方が早いですが、変数消去をしようとすると平方根が出てくる場合などはあえてそのまま残して未定乗数をとった方がいいときもあります。
拘束がある系のラグランジアン
拘束がある系のラグランジアンについては、以下のことが成り立ちます。
ただし、「拘束条件がホロノミック」とは先に述べたように、位置を表す変数間の等式による拘束であるということ、「理想拘束」とは拘束条件が許す方向に任意に仮想変位をさせたとき、拘束力のする仕事がゼロであるということ、「拘束力」とは拘束を成り立たせている力のことです(拘束力が存在しなければ拘束はできないはずで、糸につながれた運動なら張力、台上を滑る運動なら垂直抗力が拘束力にあたります)。
定理2.2.7
拘束条件がホロノミックであって理想拘束であるような力学系において、その運動を
$$
\frac{\partial L}{\partial q_i} – \frac{d}{dt} \frac{\partial L}{\partial \dot{q}_i} =\sum_{j=1}^M \lambda_j \frac{\partial G_j}{\partial q_i} \qquad (i=1,2,…,N)
$$$$
G_j(\boldsymbol{q}, t)=0 \qquad (j=1,2,…,M)
$$で記述する。ここで、その変数として直交座標\(x_1,x_2,…,x_N\)を選んだとき、任意の\(i\)に対して\(x_i\)方向のニュートンの運動方程式が\(m_i \ddot{x}_i = F_i + R_i\)とかけるとする。ただし、\(F_i\)は
$$
F_i = -\frac{\partial V}{\partial x_i} + \frac{d}{dt}\left(\frac{\partial V}{\partial \dot{x}_i}\right)
$$なるスカラー量\(V(\boldsymbol{x}, \dot{\boldsymbol{x}}, t)\)が存在するという条件を満たす外力であって、\(R_i\)は拘束力である。このとき、\(K=\sum_{i=1}^N (m_i \dot{x_i}^2 /2) \)とすると、力学系のラグランジアン\(L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t)\)として、\(K \left( \boldsymbol{x}(\boldsymbol{q}, \dot{\boldsymbol{q}}, t) \right) – V \left( \boldsymbol{x}(\boldsymbol{q}, \dot{\boldsymbol{q}}, t) \right)\)を採用できる。
定理2.2.7の証明
物体に働く力を外力\(F_i\)と、レールや糸からの拘束力\(R_i\)に分解して書いた、直交座標\(x_i\)で記述されたニュートンの運動方程式\(m_i \ddot{x}_i = F_i + R_i\)を出発点とする。これを移項して\(-m_i \ddot{x}_i + F_i + R_i = 0\)としてから、系をこの両辺に仮想的に少しだけ動かす「仮想変位\(\delta x_i\)」を掛け、すべての成分\(i\)について足し合わせると、
$$
\sum_{i=1}^N (-m_i \ddot{x}_i + F_i + R_i) \delta x_i = 0
$$となる。ここで、これを展開したときに現れる「拘束力が仮想的な移動の間にする仮想仕事」を表す項\(\sum_i R_i \delta x_i\)は、定理2.2.7の前提として「理想拘束である」ことが条件として掲げられているためゼロになることから、この式は以下のように変形できる。
$$
\sum_{i=1}^N (-m_i \ddot{x}_i + F_i) \delta x_i = 0 \qquad \text{(a)}
$$直交座標\(x_i\)は、一般化座標\(\boldsymbol{q}\)と時間\(t\)の関数\(x_i(\boldsymbol{q}, t)\) として表されるため、合成関数の微分を用いると、\(\delta x_i\)は各\(q_j\)のズレ\(\delta q_j\)によって、
$$
\delta x_i = \sum_{j} \frac{\partial x_i}{\partial q_j} \delta q_j
$$とかくことができるから、これを(a)式に代入すると、
$$
\sum_{i=1}^N (-m_i \ddot{x}_i + F_i) \left( \sum_{j} \frac{\partial x_i}{\partial q_j} \delta q_j \right) = \sum_{j} \left[ \sum_{i=1}^N (-m_i \ddot{x}_i + F_i) \frac{\partial x_i}{\partial q_j} \right] \delta q_j = 0
$$となる。さて、いま大カッコ\([\quad]\)の中身は、定理2.2.3の証明と全く同じ流れで、
$$
\sum_i \left[ \frac{\partial (K-V)}{\partial q_i} – \left( \frac{d}{dt}\frac{\partial (K-V)}{\partial \dot{q}_i} \right) \right] \delta q_i = 0
$$とかけることを用いると、ここからは定理2.2.5の証明と全く同じ流れで、\(i=1,2,…,N\)に対して、
$$
\left( \frac{\partial (K-V)}{\partial q_i} – \frac{d}{dt}\frac{\partial (K-V)}{\partial \dot{q}_i} \right) – \sum_{j=1}^M \lambda_j \frac{\partial G_j}{\partial q_i} = 0
$$を示すことができる。別稿で確認したように、ラグランジアンは実用的には現実に選んだ経路において\(\int_{t_i}^{t_f} L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t) dt\)が停留するような量、すなわち、一般化座標においてオイラー=ラグランジュ方程式を成り立たせる量であればよいため、以上より、\(L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t) = K – V\)はたしかにこの系のラグランジアンとして採用できる。□
ここで、拘束条件がホロノミックであって理想拘束であれば、保存力と拘束力が働いている系(つまり、拘束力が働いているために定理2.2.3の適用範囲外である系)であっても、ラグランジアンとして(運動エネルギー)\(-\)(ポテンシャルエネルギー)を採用することが許されたことですね。大事な定理ですよ。
コメント