
こんにちは、turtleです。現在力学を学んでおりまして、その備忘録のような形でこのブログを書かせていただいております。基本的に大学の内容となっていますが、数式さえ乗り越えれば高校生でも理解できると思っていますので、どうぞよろしくお願いいたします。
親記事で、拘束のない力学系において、古典力学のもとでのラグランジアンは(運動エネルギー)\(-\)(一般化ポテンシャル)の形でかけるといいましたが、これを再掲しておきます。
定理A.3(古典力学におけるラグランジアン)
拘束のない力学系において、その変数として直交座標\(x_1,x_2,…,x_N\)を選んだとき、任意の\(i\)に対して\(x_i\)方向のニュートンの運動方程式が\(m_i \ddot{x}_i = F_i\)とかけるとする。ただし、\(F_i\)は
$$
F_i = -\frac{\partial V}{\partial x_i} + \frac{d}{dt}\left(\frac{\partial V}{\partial \dot{x}_i}\right)
$$なるスカラー量\(V(\boldsymbol{x}, \dot{\boldsymbol{x}}, t)\)が存在するという条件を満たす。このとき、\(K=\sum_{i=1}^N (m_i \dot{x_i}^2 /2) \)とすると、力学系のラグランジアン\(L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t)\)として、\(K \left( \dot{\boldsymbol{x}}(\boldsymbol{q}, \dot{\boldsymbol{q}}, t) \right) – V \left( \boldsymbol{x}(\boldsymbol{q}, t), \dot{\boldsymbol{x}}(\boldsymbol{q}, \dot{\boldsymbol{q}}, t) ,t \right)\)を採用できる。
非保存力である摩擦などがはたらくときはどうするのかと思うかもしれませんが、原理A.2に「力学系に対応してラグランジアン\(L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t)\)が定まるならば」と書いてあるように、いつもいつでもオイラー=ラグランジュ方程式の式を計算するとニュートンの運動方程式になるような量\(L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t)\)をもってこれるわけではありません。そこで解析力学の枠組みでは非保存力について考えることを諦めて、力\(F_i\)に対して、
$$
F_i = -\frac{\partial V}{\partial x_i} + \frac{d}{dt}\left(\frac{\partial V}{\partial \dot{x}_i}\right)
$$なる一般化ポテンシャル\(V(\boldsymbol{x}, \dot{\boldsymbol{x}}, t)\)が存在するときを考えるのがふつうです。
なお、「採用できる」と曖昧な言い方をしているのは、ラグランジアンの定義がはっきりしていないからです。管理人は一貫して「何かよくわからないが物理量としてラグランジアンという量が存在するならば、これをオイラー=ラグランジュ方程式に代入すると運動が分かる」という姿勢を原理としています。ここでラグランジアンの定義を「現実に選んだ経路において\(\int_{t_i}^{t_f} L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t) dt\)が停留するような量」とか「オイラー=ラグランジュ方程式に代入するとニュートンの運動方程式に等価な式が出てくる量」とかにすると、原理2.2と循環論法になってしまいます。
だから証明自体を「\(K – V\)は定義に一致するからラグランジアンだ」という構成にすることはできず、「実用上オイラー=ラグランジュ方程式に代入するとニュートンの運動方程式に等価な式が出てくる量ならばラグランジアンとして不都合がないので、\(K – V\)はラグランジアンに採用できる」というところに留めているのです。
さて本稿では、ここから発展して拘束のあるときの古典力学のもとでのラグランジアンを考えてから、一般のラグランジアン\(L\)で証明した定理を古典力学のラグランジアンに適用した結果を見ていきましょう。
拘束のあるときの古典力学におけるラグランジアン
まず、”拘束のない”というのは、\(N\)次元の運動であれば\(x_1,x_2,…,x_N\)がそれぞれ独立に動くことができて、関係式として\(G(x_1,x_2,…,x_N,t)=0\)のようなものが存在しないということです。それに対して例えば、糸につながった運動であったり、台の上を転がる運動であったりは\(x_1,x_2,…,x_N\)の間に何らかの関係式があることが分かると思いますが、こういうときに”拘束がある”と表現します。
拘束のあるときについては、以下が成り立つことが分かっています。
ただし、「拘束条件がホロノミック」とは先に述べたように、位置を表す変数間の等式による拘束であるということ、「理想拘束」とは拘束条件が許す方向に任意に仮想変位をさせたとき、拘束力のする仕事がゼロであるということ、「拘束力」とは拘束を成り立たせている力のことです(拘束力が存在しなければ拘束はできないはずで、糸につながれた運動なら張力、台上を滑る運動なら垂直抗力が拘束力にあたります)。
定理A.3.1
拘束条件がホロノミックであって理想拘束であるような力学系において、その運動を
$$
\frac{\partial L}{\partial q_i} – \frac{d}{dt} \frac{\partial L}{\partial \dot{q}_i} =\sum_{j=1}^M \lambda_j \frac{\partial G_j}{\partial q_i} \qquad (i=1,2,…,N)
$$$$
G_j(\boldsymbol{q}, t)=0 \qquad (j=1,2,…,M)
$$で記述する。ここで、その変数として直交座標\(x_1,x_2,…,x_N\)を選んだとき、任意の\(i\)に対して\(x_i\)方向のニュートンの運動方程式が\(m_i \ddot{x}_i = F_i + R_i\)とかけるとする。ただし、\(F_i\)は
$$
F_i = -\frac{\partial V}{\partial x_i} + \frac{d}{dt}\left(\frac{\partial V}{\partial \dot{x}_i}\right)
$$なるスカラー量\(V(\boldsymbol{x}, \dot{\boldsymbol{x}}, t)\)が存在するという条件を満たす外力であって、\(R_i\)は拘束力である。このとき、\(K=\sum_{i=1}^N (m_i \dot{x_i}^2 /2) \)とすると、力学系のラグランジアン\(L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t)\)として、\(K \left( \dot{\boldsymbol{x}}(\boldsymbol{q}, \dot{\boldsymbol{q}}, t) \right) – V \left( \boldsymbol{x}(\boldsymbol{q}, \dot{\boldsymbol{q}}, t) \right)\)を採用できる。
定理A.3.1の証明
物体に働く力を外力\(F_i\)と、レールや糸からの拘束力\(R_i\)に分解して書いた、直交座標\(x_i\)で記述されたニュートンの運動方程式\(m_i \ddot{x}_i = F_i + R_i\)を出発点とする。これを移項して\(-m_i \ddot{x}_i + F_i + R_i = 0\)としてから、系をこの両辺に仮想的に少しだけ動かす「仮想変位\(\delta x_i\)」を掛け、すべての成分\(i\)について足し合わせると、
$$
\sum_{i=1}^N (-m_i \ddot{x}_i + F_i + R_i) \delta x_i = 0
$$となる。ここで、これを展開したときに現れる「拘束力が仮想的な移動の間にする仮想仕事」を表す項\(\sum_i R_i \delta x_i\)は、定理A.3.1の前提として「理想拘束である」ことが条件として掲げられているためゼロになることから、この式は以下のように変形できる。
$$
\sum_{i=1}^N (-m_i \ddot{x}_i + F_i) \delta x_i = 0 \qquad \text{(a)}
$$直交座標\(x_i\)は、一般化座標\(\boldsymbol{q}\)と時間\(t\)の関数\(x_i(\boldsymbol{q}, t)\) として表されるため、合成関数の微分を用いると、\(\delta x_i\)は各\(q_j\)のズレ\(\delta q_j\)によって、
$$
\delta x_i = \sum_{j} \frac{\partial x_i}{\partial q_j} \delta q_j
$$とかくことができるから、これを(a)式に代入すると、
$$
\sum_{i=1}^N (-m_i \ddot{x}_i + F_i) \left( \sum_{j} \frac{\partial x_i}{\partial q_j} \delta q_j \right) = \sum_{j} \left[ \sum_{i=1}^N (-m_i \ddot{x}_i + F_i) \frac{\partial x_i}{\partial q_j} \right] \delta q_j = 0
$$となる。さて、いま大カッコ\([\quad]\)の中身は、定理A.3の証明と全く同じ流れで、
$$
\sum_i \left[ \frac{\partial (K-V)}{\partial q_i} – \left( \frac{d}{dt}\frac{\partial (K-V)}{\partial \dot{q}_i} \right) \right] \delta q_i = 0
$$とかけることを用いると、ここからは定理A.2.4の証明と全く同じ流れで、\(i=1,2,…,N\)に対して、
$$
\left( \frac{\partial (K-V)}{\partial q_i} – \frac{d}{dt}\frac{\partial (K-V)}{\partial \dot{q}_i} \right) – \sum_{j=1}^M \lambda_j \frac{\partial G_j}{\partial q_i} = 0
$$を示すことができる。別稿で確認したように、ラグランジアンは実用的には現実に選んだ経路において\(\int_{t_i}^{t_f} L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t) dt\)が停留するような量、すなわち、一般化座標においてオイラー=ラグランジュ方程式を成り立たせる量であればよいため、以上より、\(L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t) = K – V\)はたしかにこの系のラグランジアンとして採用できる。□
ここで、拘束条件がホロノミックであって理想拘束であれば、保存力と拘束力が働いている系(つまり、拘束力が働いているために定理A.3の適用範囲外である系)であっても、ラグランジアンとして(運動エネルギー)\(-\)(ポテンシャルエネルギー)を採用することが許されたことですね。大事な定理ですよ。
古典力学におけるネーターの定理
ではここからは、力学系のラグランジアン\(L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t)\)として、\(K \left( \boldsymbol{q}, \dot{\boldsymbol{q}}, t \right) – V \left( \boldsymbol{q}, t \right)\)を採用できる場合に、系A.2.7、系A.2.8、系A.2.9の3つがどうかかれるかを見ていきましょう。
系A.3.2(運動量保存則)
\(K=\sum_{i=1}^N (m_i \dot{x_i}^2 /2)\)に対して、力学系のラグランジアンとして\(K \left( \boldsymbol{q}, \dot{\boldsymbol{q}}, t \right) – V \left( \boldsymbol{q}, t \right)\)が採用できるとき、系が直交座標の\(x\)軸方向に空間並進対称性をもつならば、古典力学で定義した運動量の\(x\)成分\(m \dot{x}\)が保存する。
系A.3.2の証明
系に、\(x\)方向への無限小変換に対する対称性があるから、系A.2.7より、
$$
\frac{\partial L}{\partial \dot x}= \frac{\partial K}{\partial \dot x} = \frac{\partial}{\partial \dot x} \left( \frac{m}{2}(\dot{x}^2 + \dot{y}^2 + \dot{z}^2) \right) = m \dot{x}
$$が保存するとして示された。□
系A.3.3(力学的エネルギー保存則)
\(K=\sum_{i=1}^N (m_i \dot{x_i}^2 /2)\)に対して、力学系のラグランジアンとして\(K \left( \boldsymbol{q}, \dot{\boldsymbol{q}}, t \right) – V \left( \boldsymbol{q}, t \right)\)が採用できるとき、系が時間並進対称性をもつならば、古典力学で定義した力学的エネルギー\(K+V\)が保存する。
系A.3.3の証明
系に、時間並進に対する対称性があるから、系A.2.8より、
$$
\left( \frac{\partial L}{\partial \dot{x}} \dot{x} +\frac{\partial L}{\partial \dot{y}} \dot{y}+\frac{\partial L}{\partial \dot{z}} \dot{z}\right) – L = m(\dot{x}^2 + \dot{y}^2 + \dot{z}^2) -\left( \frac{m}{2}(\dot{x}^2 + \dot{y}^2 + \dot{z}^2) – V\right) = \frac{m}{2}(\dot{x}^2 + \dot{y}^2 + \dot{z}^2) + V = K+V
$$が保存するとして示された。□
系A.3.4(角運動量保存則)
\(K=\sum_{i=1}^N (m_i \dot{x_i}^2 /2)\)に対して、力学系のラグランジアンとして\(K \left( \boldsymbol{q}, \dot{\boldsymbol{q}}, t \right) – V \left( \boldsymbol{q}, t \right)\)が採用できるとき、系が空間回転対称性をもつならば、古典力学で定義した角運動量\(\sum_{i=1}^N \boldsymbol{r}_i \times m\dot{\boldsymbol{r}}_i\)が保存する
系A.3.4の証明
系に、時間回転に対する対称性があるから、系A.2.9より、
$$
\sum_{i=1}^N \boldsymbol{r}_i \times \left( \nabla_{\boldsymbol{r}_i} L \right) = \sum_{i=1}^N \boldsymbol{r}_i \times \left( \nabla_{\boldsymbol{r}_i} K \right) = \sum_{i=1}^N \boldsymbol{r}_i \times m\dot{\boldsymbol{r}}_i
$$が保存するとして示された。□
これよりいとも簡単に、古典力学における運動量保存則、力学的エネルギー保存則、角運動量保存則が示されましたね。なお系A.3.2については、もちろん系が直交座標の\(y\)軸方向、\(z\)軸方向に空間並進対称性をもつならば、古典力学で定義した運動量の\(y\)成分、\(z\)成分が保存します。
古典力学のもとでのラグランジュ力学の議論
さて、ここからは話を変えて、ラグランジアンとして\(K \left( \boldsymbol{q}, \dot{\boldsymbol{q}}, t \right) – V \left( \boldsymbol{q}, t \right)\)が採用できるとき、その表式が与えられたら、オイラー=ラグランジュ方程式によって完全な運動を解かずとも、ポテンシャルによって運動の大体の様子を議論することができることについて扱います。
物理や工学においてこれは非常に有効であるので、本稿ではポテンシャルから運動の概形を把握する議論について見ていきましょう。
定理A.3.5
\(K=\sum_{i=1}^N (m_i \dot{x_i}^2 /2)\)に対して、力学系のラグランジアンとして\(K \left( \boldsymbol{q}, \dot{\boldsymbol{q}}, t \right) – V \left( \boldsymbol{q}, t \right)\)が採用できるとき、ラグランジアンが時間\(t\)を直接の変数としては含まないならば、時間変化しない定数\(K+V\)の値を\(E\)とすると、運動する領域は\(V \le E\)の範囲のみに限られる。
定理A.3.5の証明
系A.2.8より、系に時間並進対称性があるならば、物理量
$$
\left( \frac{\partial L}{\partial \dot{x}} \dot{x} +\frac{\partial L}{\partial \dot{y}} \dot{y}+\frac{\partial L}{\partial \dot{z}} \dot{z}\right) – L = m(\dot{x}^2 + \dot{y}^2 + \dot{z}^2) -\left( \frac{m}{2}(\dot{x}^2 + \dot{y}^2 + \dot{z}^2) – V\right) = \frac{m}{2}(\dot{x}^2 + \dot{y}^2 + \dot{z}^2) + V = K+V
$$が時間変化に対して保存する。ここで、この定数\(K+V\)の値を\(E\)とすると、\(K=\sum_{i=1}^N (m_i \dot{x_i}^2 /2) \)は平方和より非負であるから、たしかに運動する領域は\(K=E-V \ge 0\)、すなわち\(V \le E\)の範囲のみに限られる。□
定理A.3.6
\(K=\sum_{i=1}^N (m_i \dot{x_i}^2 /2)\)に対して、力学系のラグランジアンとして\(K \left( \boldsymbol{q}, \dot{\boldsymbol{q}}, t \right) – V \left( \boldsymbol{q}, t \right)\)が採用できるとき、ラグランジアンが時間\(t\)を直接の変数としては含まないならば、\(\nabla_{\boldsymbol{q}} V= \boldsymbol{0}\)なる位置\(\boldsymbol{q}=\boldsymbol{q}_0\)が平衡点である、つまり位置\(\boldsymbol{q}=\boldsymbol{q}_0\)に速度ゼロで置かれた質点の加速度\(\ddot{\boldsymbol{q}} \)はゼロとなる。
定理A.3.6の証明
点変換で対応する独立な座標系ならどんな一般化座標の取り方であっても、オイラー=ラグランジュ方程式が成り立って同じ運動を解として与えるので、代表して直交座標\(\boldsymbol{x}= (x_1, x_2, \dots, x_N)\)において成り立っていればよい。ここで、定理A.3.6で仮定した一般化座標\(\boldsymbol{q}=\boldsymbol{q}_0\)でのポテンシャルの勾配\(\nabla_{\boldsymbol{q}} V\)が\(\boldsymbol{0}\)であることは、
$$
\frac{\partial V}{\partial q_j} = \sum_{i=1}^N \frac{\partial V}{\partial x_i} \frac{\partial x_i}{\partial q_j}=0
$$であることと、座標変換のヤコビ行列(\(\frac{\partial x_i}{\partial q_j}\)を並べた行列)が逆行列をもつことから、対応する直交座標での位置一般化座標\(\boldsymbol{x}=\boldsymbol{x}_0\)における\(\nabla_{\boldsymbol{x}} V\)が\(\boldsymbol{0}\)であることに等価である。
さて、直交座標によるラグランジアン\(K=\sum_{i=1}^N (m_i \dot{x_i}^2 /2) \)をオイラー=ラグランジュ方程式に入れると、
$$
m_i \ddot{x}_i = – \frac{\partial V}{\partial x_i}
$$とかけるので、\(\nabla_{\boldsymbol{x}} V|_{\boldsymbol{x}=\boldsymbol{x}_0} = \boldsymbol{0}\)をふまえると、\(m_i \boldsymbol{\ddot{x}}|_{\boldsymbol{x}=\boldsymbol{x}_0} = 0\)、すなわち\(\ddot{\boldsymbol{x}}|_{\boldsymbol{x}=\boldsymbol{x}_0} =\boldsymbol{0}\)である。よって、たしかに位置\(\boldsymbol{x}=\boldsymbol{x}_0\)に速度ゼロで置かれた質点の加速度\(\ddot{\boldsymbol{x}} \)はゼロとなるから、この位置は平衡点である。□
定理A.3.7
\(K=\sum_{i=1}^N (m_i \dot{x_i}^2 /2)\)に対して、力学系のラグランジアンとして\(K \left( \boldsymbol{q}, \dot{\boldsymbol{q}}, t \right) – V \left( \boldsymbol{q}, t \right)\)が採用できるとき、ラグランジアンが時間\(t\)を直接の変数としては含まないならば、定理A.3.6にしたがって平衡点\(\boldsymbol{q}=\boldsymbol{q}_0\)を求めることができる。これに対して、
\(\frac{\partial^2 V}{\partial q_i^2}|_{\boldsymbol{q}=\boldsymbol{q}_0} \ge 0\)ならばその平衡点は変数\(q_i\)のずれに対して安定、
\(\frac{\partial^2 V}{\partial q_i^2}|_{\boldsymbol{q}=\boldsymbol{q}_0} \le 0\)ならばその平衡点は変数\(q_i\)のずれに対して不安定である。
定理A.3.7の証明
平衡点\(\boldsymbol{q}=\boldsymbol{q}_0\)から\(q_i\)方向に微小\(\delta q_i\)だけずれた位置\(\boldsymbol{q}_0 + \delta q_i \boldsymbol{e}_i\)におけるポテンシャルは、テイラー展開で2次の微小量まで残すと、
$$
V|_{\boldsymbol{q}=\boldsymbol{q}_0 + \delta q_i \boldsymbol{e}_i} = V_{\boldsymbol{q}=\boldsymbol{q}_0} + \frac{\partial^2 V}{\partial q_i^2}|_{\boldsymbol{q}=\boldsymbol{q}_0} (\delta q_i)^2
$$となる。\(L|_{{\boldsymbol{q}=\boldsymbol{q}_0 + \delta q_i \boldsymbol{e}_i}}=K-V|{{\boldsymbol{q}=\boldsymbol{q}_0 + \delta q_i \boldsymbol{e}_i}}\)について、オイラー=ラグランジュ方程式を計算すると、\(\frac{\partial^2 V}{\partial q_i^2}|_{\boldsymbol{q}=\boldsymbol{q}_0} \ge 0\)ならば、変数\(q_i\)に対して単振動型の運動方程式、\(\frac{\partial^2 V}{\partial q_i^2}|_{\boldsymbol{q}=\boldsymbol{q}_0} \le 0\)ならば、変数\(q_i\)に対して指数関数的に増加する運動方程式が出てくるため、示される。□
これらの定理から、ポテンシャル\(V\)のグラフを書くことで、おおまかな運動の様子を判断することができます。例えば、ポテンシャル\(V\)のグラフが以下のようだったとします。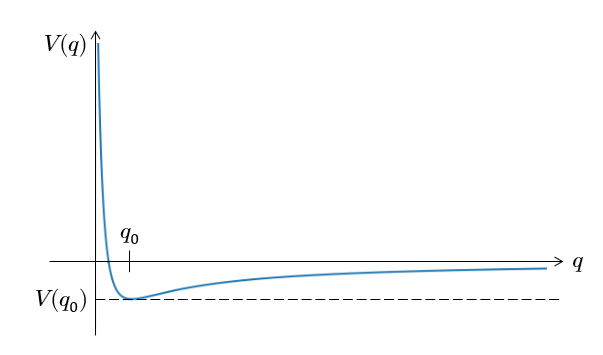
このときは、位置\(\boldsymbol{q}=\boldsymbol{q}_0\)において安定な平衡点を取り、時間変化しない定数\(K+V\)の値を\(E\)とすると、
\(E=V(q_0)\)ならば、変数\(q\)が一定の運動、
\(V< E < 0\)ならば、変数\(q\)がある閉じた範囲を動く運動、
\(0 \le E\)ならば、変数\(q\)が\(q \to \infty\)まで動くことができる運動を行うと判断できますね。
なお、とくにラグランジアン\(L\)に「含まれていない」変数があるときに限定すると、ラグランジアン\(L\)からオイラー=ラグランジュ方程式を解かないでもわかることはまだあります。これには有効ポテンシャルという議論を使うので、別稿で紹介します。
>>有効ポテンシャルとラウシアン
コメント