
こんにちは、turtleです。現在力学を学んでおりまして、その備忘録のような形でこのブログを書かせていただいております。基本的に大学の内容となっていますが、数式さえ乗り越えれば高校生でも理解できると思っていますので、どうぞよろしくお願いいたします。
本稿ではハミルトン力学の大きな特徴である「位相空間」という概念について説明します。
ところで当然ですが、私たちが現実で粒子の運動をみるときは、ある時刻を切り取ると粒子が3次元空間中のどこかにいるという”配置”が与えられます。これは「実空間」とよばれ、質点が\(N\)個あっても3次元の空間で運動を表現します。
続いて、系の配置を決めるために必要な変数を全部まとめて1点で表す空間を「配位空間」といいます。これは質点が\(N\)個あってそれぞれが3自由度で運動する状況なら\(3N\)次元の空間になりますし、配位空間の軸は必ずしも\(x,y,z\)ではなくて角度変数や原点からの距離など何でも構わない一般化座標であるという点で「実空間」と異なります。
さて、これら「実空間」や「配位空間」で運動をみるときの問題はなんでしょうか。ここは少々天下り的に答えを与えますが、同じ配置にいてもその後の運動が1通りとは限らず、たとえば1次元の質点が位置\(x=0\)にいるとしても、そのときの速度によってその後の運動は多種多様で決めきれないことではないでしょうか。
これを解決するのが「位相空間」です。位相空間中の配置は、配位空間中の配置よりも多くの情報を持っていて、配置が与えられればそのあと次の時刻での運動が決定してしまうという特殊な空間であるわけです。
位相空間とはどういうものか
定義2.5.1(位相空間の定義)
ある自由度\(N\)の力学系に対して、系の一般化座標\(q_i\)とそれに共役な一般化運動量\(p_i\)の計\(2N\)の変数を座標とするような\(2N\)次元の空間のことを、その系の位相空間と定義する。
さて、例として\(z\)軸方向の1次元放物運動を考えてみましょう。この系に対する位相空間は、位置を表す\(q=z\)とそれに共役な\(z\)軸方向の運動量\(p=p_z\)の2つを変数とする2次元の平面になりますよね。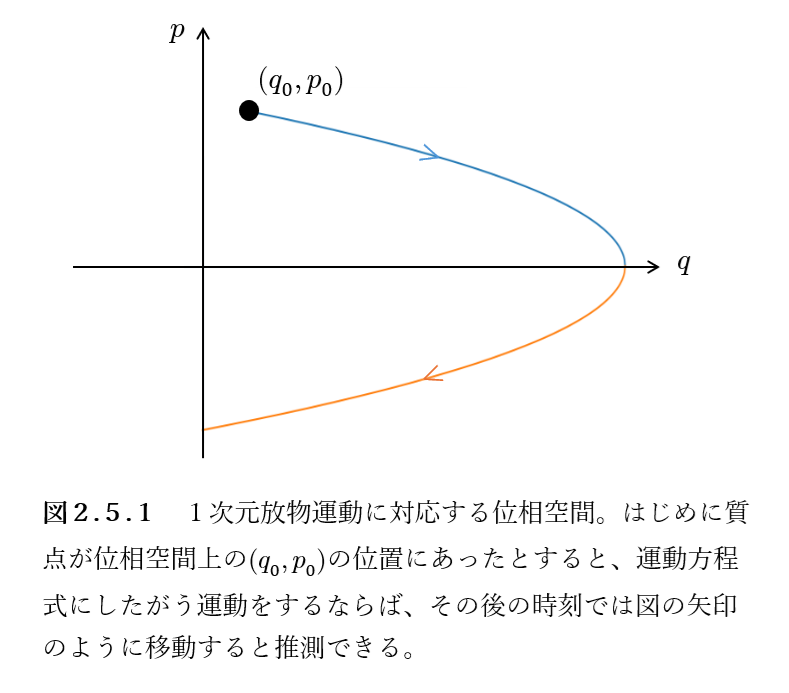
図2.5.1のように、たとえばはじめに質点が位相空間上の\(q_0,p_0\)の位置にあったとしましょう。これは\(p_0 >0\)ですから、\(z\)座標が\(q_0\)であるような、\(z\)軸方向に正の速度をもつ質点に対応します。この質点は運動方程式にしたがう運動をするならば、やがて最高点に達してから落下するので、とりあえず\(z >0\)の範囲では図の矢印のように配位空間上を移動すると推測できますよね。
さて、いまやったことは、はじめに質点が位相空間上の\(q_0,p_0\)の位置にいたという情報だけから、そのあと位相空間上でどういう運動をするかを決定するということです。まさしく、先ほど述べた位相空間上での配置が与えられればそのあと次の時刻での運動が直ちに決定してしまうという位相空間の特徴を使っていますね。
無論、いまは運動を実際に頭の中で想像したので、想像できない運動だったらどうするのかとか疑義があるのは当然です。ところが実際には、「位相空間上での配置からそのあとの位相空間上での運動を決定する」のは、別に運動が想像できなくとも、その系のハミルトニアンさえわかれば可能です。これについて見ていきましょう。
定理2.5.2
位相空間上の位置\((\boldsymbol{q},\boldsymbol{p})\)における、位相空間上の時間発展の速度ベクトルは\((\nabla_{\boldsymbol{p}}H, -\nabla_{\boldsymbol{q}}H)\)とかける。
定理2.5.2の証明
位相空間上の時間発展の速度ベクトルは\((\dot{\boldsymbol{q}}, \dot{\boldsymbol{p}})\)であるが、正準方程式\(\dot{q}_i= \frac{\partial H}{\partial p_i}, \dot{p}_i= -\frac{\partial H}{\partial q_i}\)より、\((\dot{\boldsymbol{q}}, \dot{\boldsymbol{p}})=(\nabla_{\boldsymbol{p}}H, -\nabla_{\boldsymbol{q}}H)\)として示された。□
系2.5.3
位相空間上の時間発展の速度ベクトルは、位相空間上のハミルトニアンの勾配\((\nabla_{\boldsymbol{q}}H, \nabla_{\boldsymbol{p}}H)\)と直交する。
系2.5.3の証明
位相空間上の時間発展の速度ベクトル\((\nabla_{\boldsymbol{p}}H, -\nabla_{\boldsymbol{q}}H)\)と、位相空間上のハミルトニアンの勾配\((\nabla_{\boldsymbol{q}}H, \nabla_{\boldsymbol{p}}H)\)の内積をとると、\(\left( \sum_{i=1}^N \frac{\partial H}{\partial q_i} \frac{\partial H}{\partial p_i} \right) – \left( \sum_{i=1}^N \frac{\partial H}{\partial q_i} \frac{\partial H}{\partial p_i} \right) = 0\)より示された。□
系2.5.4(エネルギー保存則)
ハミルトニアンが時刻\(t\)を直接の変数として含まないとき、正準方程式に従う運動では、ハミルトニアンは時間変化に対して保存する。
系2.5.4の証明
時刻\(t\)を直接の変数として含まないハミルトニアン\(H(\boldsymbol{q}, \boldsymbol{p})\)の時間による全微分は、合成関数の微分より、
$$
\frac{dH}{dt} = \sum_{i=1}^N \frac{\partial H}{\partial q_i} \dot{q}_i + \sum_{i=1}^N \frac{\partial H}{\partial p_i} \dot{p}_i = (\nabla_{\boldsymbol{q}}H, \nabla_{\boldsymbol{p}}H) \cdot (\dot{\boldsymbol{q}}, \dot{\boldsymbol{p}}) = (\nabla_{\boldsymbol{q}}H, \nabla_{\boldsymbol{p}}H) \cdot (\nabla_{\boldsymbol{p}}H, -\nabla_{\boldsymbol{q}}H) = \left( \sum_{i=1}^N \frac{\partial H}{\partial q_i} \frac{\partial H}{\partial p_i} \right) – \left( \sum_{i=1}^N \frac{\partial H}{\partial q_i} \frac{\partial H}{\partial p_i} \right) = 0
$$となる。ただし、3つ目の等号は、正準方程式に従う運動において\((\dot{\boldsymbol{q}}, \dot{\boldsymbol{p}})=(\nabla_{\boldsymbol{p}}H, -\nabla_{\boldsymbol{q}}H)\)とかけることを用いた。ハミルトニアンの時間微分がゼロであることは、ハミルトニアンが時間変化に対して保存するということを意味するので、示された。□
系2.5.4については実は、系2.2.10と主張自体は同じで、証明をハミルトン力学の範囲で書き直したということになります。なお、ハミルトン力学で保存則をいかに扱うかは、また別稿で話します。
なんにせよ、ここまで話したことはとても重要です。系のハミルトニアンが分かれば、位相空間上の各位置に対して速度ベクトルが与えられる、ということは位相空間上には、まるで空間中に設定された流れのように速度ベクトル場が敷き詰められていて、系の状態\(\boldsymbol{q},\boldsymbol{p}\)はそれに流されるように移ろっていくということが分かります。
具体的な力学系として、1次元調和振動子、1次元放物運動、単振り子の3つを想定し、それぞれのケースで位相空間上の速度ベクトル場を実際に計算してみましょう。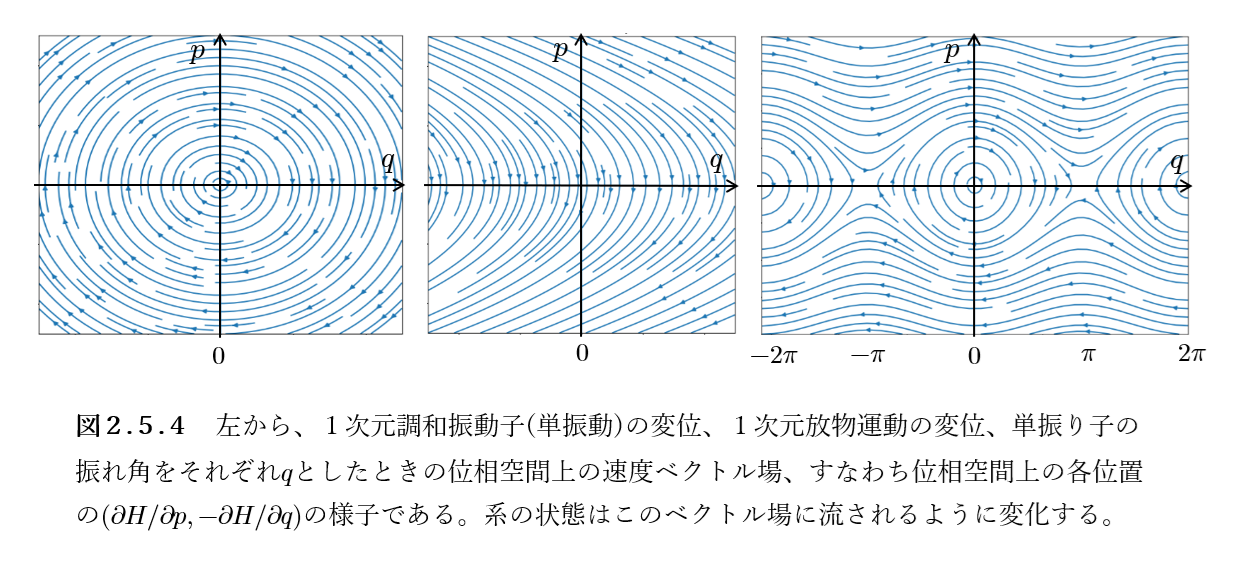
【1次元調和振動子の場合】
質量を\(m\)、バネ定数を\(k\)、変位を\(q\)とすると、ラグランジアン、変位に共役な運動量、ハミルトニアンは順に、
$$
L = \frac{1}{2}m\dot{q}^2 – \frac{1}{2}kq^2 \qquad p = \frac{\partial L}{\partial \dot{q}} = m\dot{q} \qquad H = p \left(\frac{p}{m}\right) – \left( \frac{1}{2}m\left(\frac{p}{m}\right)^2 – \frac{1}{2}kq^2 \right) = \frac{p^2}{2m} + \frac{1}{2}kq^2
$$となります。これより、位相空間上の位置\((q, p)\)における速度ベクトルは、
$$
(\dot{q}, \dot{p}) = \left( \frac{\partial H}{\partial p}, -\frac{\partial H}{\partial q} \right) = \left( \frac{p}{m}, -kq \right)
$$とかけるので、その速度ベクトル場は図2.5.4の一番左の図のようになります。この図からどんな運動かを読み取りましょう。矢印を繋ぐと、原点を中心とした時計回りの渦になっていて、行ったり来たりを繰り返す振動をするとわかります。また、図の真ん中の原点\((q, p) = (0, 0)\)は、バネが自然長でかつ静止している状態ですが、この点では速度ベクトルも\((\dot{q}, \dot{p})\)も\((0, 0)\)になるため、ここが安定な平衡点であることもわかりますね。
【1次元放物運動の場合】
質量を\(m\)、変位を\(q\)とすると、ラグランジアン、変位に共役な運動量、ハミルトニアンは順に、
$$
L = \frac{1}{2}m\dot{q}^2 – mgq \qquad p = \frac{\partial L}{\partial \dot{q}} = m\dot{q} \qquad H = p \left(\frac{p}{m}\right) – \left( \frac{1}{2}m\left(\frac{p}{m}\right)^2 – mgq \right) = \frac{p^2}{2m} + mgq
$$となります。これより、位相空間上の位置\((q, p)\)における速度ベクトルは、
$$
(\dot{q}, \dot{p}) = \left( \frac{\partial H}{\partial p}, -\frac{\partial H}{\partial q} \right) = \left( \frac{p}{m}, -mg \right)
$$とかけるので、その速度ベクトル場は図2.5.4の真ん中の図のようになります。この図からどんな運動かを読み取りましょう。図を見ると、すべての矢印が全体的に下へ下へと向かって流れていますが、これは重力によって常に下向きに引っ張られ、運動量が減り続けているという事実を視覚化しているとわかりますね。
【単振り子の場合】
質量を\(m\)、糸の長さを\(l\)、最下点からの振れ角を\(q\)とすると、ラグランジアン、変位に共役な運動量、ハミルトニアンは順に、
$$
L = \frac{1}{2}ml^2\dot{q}^2 – mgl(1 – \cos q) \qquad
p = \frac{\partial L}{\partial \dot{q}} = ml^2\dot{q} \qquad
H = \frac{p^2}{2ml^2} + mgl(1 – \cos q)
$$となります。これより、位相空間上の位置\((q, p)\)における速度ベクトルは、
$$
(\dot{q}, \dot{p}) = \left( \frac{\partial H}{\partial p}, -\frac{\partial H}{\partial q} \right) = \left( \frac{p}{ml^2}, -mgl \sin q \right)
$$とかけるので、その速度ベクトル場は図2.5.4の一番右の図のようになります。この図からどんな運動かを読み取りましょう。
まず、中心付近は閉じた軌道をしていますが、これは1次元調和振動子のときと類似しており、行ったり来たりを繰り返す振動をするとわかります。続いて、ハミルトニアン\(H\)が十分大きい条件では、振り子が最高点\(q = \pi, -\pi\)を通過してコマのように同じ方向に何周も回転し続ける状態になるとわかります。上半分の流線は右へ流れていますがこれは時計回りに延々と回転し続けているため、下半分の流線は左へ流れていますがこれは反時計回りに延々と回転し続けているため、流線が波打っているのは重力の影響で回転に伴う加減速を繰り返しているためです。
なお、図の\(q = \pi, -\pi\)の横軸上の点に注目すると、この点では速度ベクトルが\((\dot{q}, \dot{p})\)も\((0, 0)\)になっており、振り子がギリギリ真上に到達するだけのエネルギーを与えられ、無限の時間をかけて真上でピタッと止まるという不安定な平衡点を表しているとわかりますね。
さて、ここでは簡単な例を扱ったため、実際の運動を想像しながら話しましたが、位相空間の醍醐味は想像できない運動の時間発展をハミルトニアンから予想できることにあります。平衡点やその安定性を議論したり、周期運動かどうかを判定したり、保存則で許される運動領域を調べたりするのが位相空間の流れを見るだけで済んでしまう、という意味で位相空間がいかに強力なものか分かっていただけたでしょうか。
位相空間の流れの特徴
ここからは、位相空間上の速度ベクトル場に関して成り立つ定理を紹介していきます。
定理2.5.5
位相空間上の速度ベクトル場の発散は、いたるところゼロである。
定理2.5.5の証明
位相空間上の速度ベクトル場\(\left( \frac{\partial H}{\partial p}, -\frac{\partial H}{\partial q} \right) \)の発散をとると、以下のように示される。
$$
\nabla \cdot \begin{pmatrix} \frac{\partial H}{\partial p} \\ -\frac{\partial H}{\partial q} \end{pmatrix} = \frac{\partial}{\partial q} \frac{\partial H}{\partial p} – \frac{\partial}{\partial p} \frac{\partial H}{\partial q} = 0
$$□
これは、位相空間上に速度ベクトル場をびっしりかいたときに、どこにも湧き出し口や吸い込み口がないということです。湧き出し口や吸い込み口がある場の例としては静電場がわかりやすく、正電荷から電場が湧き出し、負電荷に静電場が吸い込まれていますが、位相空間上の速度ベクトル場はそのような場の源となるものがなくただ流れているだけだという意味ですよ。
定理2.5.6(リウヴィルの定理)
正準方程式にしたがって時間発展する、位相空間内の任意の領域\(D\)を考えたとき、その形状は一般に変化するが、位相空間における体積は保存される。
定理2.5.6の証明
いま位相空間内の微小超直方体領域\(D\)として、
$$
[q_1, q_1+\delta q_1] \times [q_2, q_2+\delta q_2] \times … [q_N, q_N+\delta q_N] \times [p_1, p_1+\delta p_1] \times [p_2, p_2+\delta p_2] \times … [p_N, p_N+\delta p_N]
$$を考えたとき、正準方程式にしたがう\(\delta t\)秒間の時間発展によってこの領域の形状は変化するが、位相空間における超体積は変化しないことを示せばよい。位相空間の座標について\(\boldsymbol{x} = (q_1,…, q_N, p_1,…, p_N)\)とおき、また各点での位相空間上の速度ベクトルを\(\boldsymbol{v}(\boldsymbol{x}) = (\dot{q}_1,…, \dot{q}_N, \dot{p}_1, …, \dot{p}_N)\)とかくこととする。さて、正準方程式にしたがう\(\delta t\)秒間の時間発展によって、
はじめ\(\boldsymbol{x}\)にいた粒子は\(\boldsymbol{x} + \boldsymbol{v}(\boldsymbol{x})\delta t\)に、
はじめ\(\boldsymbol{x} + \delta q_j \boldsymbol{e}_{q_j}\)にいた粒子は\(\boldsymbol{x} + \delta q_j \boldsymbol{e}_{q_j} + \boldsymbol{v}(\boldsymbol{x} + \delta q_j \boldsymbol{e}_{q_j})\delta t = \boldsymbol{x} + \delta q_j \boldsymbol{e}_{q_j} + \left( \boldsymbol{v}(\boldsymbol{x}) + \frac{\partial \boldsymbol{v}}{\partial q_j}\delta q_j \right)\delta t\)に、
はじめ\(\boldsymbol{x} + \delta p_j \boldsymbol{e}_{p_j}\)にいた粒子は\(\boldsymbol{x} + \delta p_j \boldsymbol{e}_{p_j} + \boldsymbol{v}(\boldsymbol{x} + \delta p_j \boldsymbol{e}_{p_j})\delta t = \boldsymbol{x} + \delta p_j \boldsymbol{e}_{p_j} + \left( \boldsymbol{v}(\boldsymbol{x}) + \frac{\partial \boldsymbol{v}}{\partial p_j}\delta p_j \right)\delta t\)に移動するので、\(\delta t\)秒後の領域\(D\)は超平行多面体となる。この超平行多面体をつくる新しい\(2N\)本のベクトルは、移動後の各点からベクトルの引き算をすると求められ、
$$
\left\{ \boldsymbol{E}_{q_j} \right\}_{j=1}^N = \left\{ \left( \boldsymbol{e}_{q_j} + \frac{\partial \boldsymbol{v}}{\partial q_j}\delta t \right) \delta q_j \right\}_{j=1}^N \qquad \left\{ \boldsymbol{E}_{p_j} \right\}_{j=1}^N =\left\{ \left( \boldsymbol{e}_{p_j} + \frac{\partial \boldsymbol{v}}{\partial p_j}\delta t \right) \delta p_j \right\}_{j=1}^N
$$となる。この超平行多面体の超体積\(V’\)を求める。線形代数の定理より、超体積\(V’\)は、新しい辺のベクトルを列ベクトルとして並べた行列の行列式の絶対値になることが示されているから、
\begin{align*}
&V’ = \left| \det \left( \boldsymbol{E}_{q_1} \boldsymbol{E}_{q_2} … \boldsymbol{E}_{q_N} \boldsymbol{E}_{p_1} \boldsymbol{E}_{p_2} … \boldsymbol{E}_{p_N} \right) \right| = \left| \space \det \left[ \begin{pmatrix} \delta q_1 + \left( \frac{\partial \dot{q}_1}{\partial q_1} \delta q_1 \right)\delta t \\ \left( \frac{\partial \dot{q}_2}{\partial q_1} \delta q_1 \right)\delta t \\ \vdots \\ \left( \frac{\partial \dot{p}_N}{\partial q_1} \delta q_1 \right)\delta t \end{pmatrix} … \begin{pmatrix} \left( \frac{\partial \dot{q}_1}{\partial p_N} \delta p_N \right)\delta t \\ \left( \frac{\partial \dot{q}_2}{\partial p_N} \delta p_N \right)\delta t \\ \vdots \\ \delta p_N + \left( \frac{\partial \dot{p}_N}{\partial p_N} \delta p_N \right)\delta t \end{pmatrix} \right] \right| \\[4pt]
&= \left| \space \det \left[ \delta q_1 \begin{pmatrix} 1 + \frac{\partial \dot{q}_1}{\partial q_1} \delta t \\ \frac{\partial \dot{q}_2}{\partial q_1} \delta t \\ \vdots \\ \frac{\partial \dot{p}_N}{\partial q_1} \delta t \end{pmatrix} … \delta p_N \begin{pmatrix} \frac{\partial \dot{q}_1}{\partial p_N} \delta t \\ \frac{\partial \dot{q}_2}{\partial p_N} \delta t \\ \vdots \\ 1+ \frac{\partial \dot{p}_N}{\partial p_N} \delta t \end{pmatrix} \right] \right|\\[4pt]
&= (\delta q_1 \dots \delta q_N \delta p_1 \dots \delta p_N) \times \left| \det \begin{pmatrix} 1 + \frac{\partial \dot{q}_1}{\partial q_1} \delta t & \dots & \frac{\partial \dot{q}_1}{\partial p_N} \delta t \\ \vdots & \ddots & \vdots \\ \frac{\partial \dot{p}_N}{\partial q_1} \delta t & \dots & 1 + \frac{\partial \dot{p}_N}{\partial p_N} \delta t \end{pmatrix} \right| = (\delta q_1 \dots \delta q_N \delta p_1 \dots \delta p_N)
\end{align*}とかける。ただし、5つ目の等号は、微小量\(\delta t\)については2次以上の項を捨てているので、行列式の計算は対角成分の積に他ならないことから、
\begin{align*}
&\left| \det \begin{pmatrix} 1 + \frac{\partial \dot{q}_1}{\partial q_1} \delta t & \dots & \frac{\partial \dot{q}_1}{\partial p_N} \delta t \\ \vdots & \ddots & \vdots \\ \frac{\partial \dot{p}_N}{\partial q_1} \delta t & \dots & 1 + \frac{\partial \dot{p}_N}{\partial p_N} \delta t \end{pmatrix} \right| \approx \left( 1 + \frac{\partial \dot{q}_1}{\partial q_1} \delta t \right) \times \dots \times \left( 1 + \frac{\partial \dot{p}_N}{\partial p_N} \delta t \right) \\
&\approx 1 + \left( \frac{\partial \dot{q}_1}{\partial q_1} + \dots + \frac{\partial \dot{q}_N}{\partial q_N} + \frac{\partial \dot{p}_1}{\partial p_1} + \dots + \frac{\partial \dot{p}_N}{\partial p_N} \right) \delta t = 1+ \sum_{i=1}^N \left( \frac{\partial \dot{q}_i}{\partial q_i} + \frac{\partial \dot{p}_i}{\partial p_i} \right) \\
&= 1+ \sum_{i=1}^N \left( \frac{\partial}{\partial q_i}\left(\frac{\partial H}{\partial p_i}\right) + \frac{\partial}{\partial p_i}\left(-\frac{\partial H}{\partial q_i}\right) \right) = 1
\end{align*}という計算が成り立つことを用いている。ただし、この計算の4つ目の等号は正準方程式を用いている。\((\delta q_1 \dots \delta q_N \delta p_1 \dots \delta p_N)\)というのはもとの超直方体の超体積より、新しい超平行多面体ともとの超直方体の超体積が等しいことがいえたので、以上より示された。□
以上、位相空間についてのまず知っておくべき特徴でした。
コメント