
第1章―ラグランジュ力学を復習する
こんにちは、管理人のturtleです。
本稿はあくまで管理人の備忘録として書いておりますが、解析力学を学びたい読者ならだれでも理解できる形を目指しております。本稿はこちらの子記事となっておりますので、よければ合わせてご覧ください。
では、いきなりですが、解析力学の話をしていきます。
1 最小作用の原理
まずは、次のように物理量として「ラグランジアン\(L\)」と「作用\(S\)」を定義して、次のようなことを原理としましょう。
定義1.1(ラグランジアンの定義)
系の一般化座標を\(\boldsymbol{q}=(q_1,q_2,…,q_N)\)としたとき、各時刻における系の状態\((\boldsymbol{q}, \dot{\boldsymbol{q}}, t)\)を引数として、その系の自由度や対称性、相互作用を正しく表すように選ばれる物理量\(L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t)\)を、ラグランジアンと定義する。
定義1.2(作用の定義)
系の一般化座標を\(\boldsymbol{q}=(q_1,q_2,…,q_N)\)、系に対応するラグランジアンを\(L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t)\)としたとき、
$$
S=\int_{t_i}^{t_f} L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t) dt
$$なる物理量\(S\)を、時刻\(t_i\)から時刻\(t_f\)までの作用と定義する。
原理1.3(最小作用の原理)
現実に物体が通過する経路\(\boldsymbol{q}(t)\)においては作用\(S\)が停留する、すなわち、始点\(\boldsymbol{q}(t_i)\)と終点 \(\boldsymbol{q}(t_f)\)を固定したときの作用の変分\(\delta S\)がゼロになる。
かなり突飛にいろんなことが出てきて、何を言っているのかわからないように思えますが、くわしくはこちらで説明しています。
大事なことだけ書いておくと、原理というのは、証明はできないけれどたしかに現実の運動がそれにしたがっている、という主張のことで、古典力学におけるニュートンの運動方程式、古典電磁気学におけるマクスウェル方程式みたいなものですね。
今回、解析力学をはじめるにあたって、原理1.3、すなわち「現実に物体が通過する経路\(\boldsymbol{q}(t)\)においては、作用\(S=\int_{t_i}^{t_f} L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t) dt\)が停留する」という主張が、現実に起こる運動と非常によく整合しているから、証明なしに受け入れてしまおうということです。
2 オイラー=ラグランジュ方程式
先ほどの原理1.3から、以下の定理1.4が導かれます。
定理1.4(オイラー=ラグランジュ方程式)
系の一般化座標を\(\boldsymbol{q}=(q_1,q_2,…,q_N)\)、系に対応するラグランジアンを\(L(\boldsymbol{q}, \dot{\boldsymbol{q}}, t)\)としたとき、\(i=1,2,…,N\)に対して以下が成り立つ。
$$
\frac{\partial L}{\partial q_i} – \frac{d}{dt} \frac{\partial L}{\partial \dot{q}_i} =0
$$
さて、ここまでがラグランジュ力学の出発点です。本稿で行う議論は、ここまでわかっていれば大丈夫です。
第2章―古典力学における質点の運動を考える
1 ラグランジアンを考える
では、本題に入りましょう。
本稿では、古典力学における質点の運動を、ラグランジュ力学を使って考えてみます。といっても、話はそこまで難しくはなく、ラグランジアンさえわかってしまえば、あとはオイラー=ラグランジュ方程式に代入して解けてしまいますから、ひとまずこの節でやるのは質点のラグランジアンを求めることですね。
まず外力を受けない自由な質点のラグランジアンは、親記事のこちらで扱ったものと同様で、次のようになります。
定理2.1
外力を受けない自由な質点について、その速度\(\dot{\boldsymbol{r}}\)の関数として\(K(\dot{\boldsymbol{r}})=C|\dot{\boldsymbol{r}}|^2 \)を定義する(ただし\(C\)は質点に固有の定数である)。このとき、この質点のラグランジアンとして、\(L(\boldsymbol{r}, \dot{\boldsymbol{r}}, t) = K (\dot{\boldsymbol{r}})\)を採用できる。
定理2.1の証明
この証明は、親記事のこちらで扱っているものの前半である。
定義1.1にしたがって、物理系の自由度や対称性、相互作用を正しく表すようなラグランジアン\(L(\boldsymbol{r}, \dot{\boldsymbol{r}}, t)\)を選ぶので、ここでは古典力学の要請である、時間の一様性、空間の一様性、空間の等方性、そしてガリレイの相対性原理を満たすようにする。
時間と空間の一様性より、ラグランジアン\(L\)は時刻\(t\)と位置\(\boldsymbol{r}\)を直接の変数としては含まず、かつ空間の等方性より、ラグランジアン\(L\)に含まれる速度\(\dot{\boldsymbol{r}}\)はその符号に依存しないため、\(L\)は速度の大きさの2乗\(|\dot{\boldsymbol{r}}|^2\)の関数\(L(|\dot{\boldsymbol{r}}|^2)\)としてかける必要がある。
さらに、ガリレイの相対性原理「互いに等速直線運動するすべての慣性系において、物理法則は同じでなければならない」の要請を考える。微小な相対速度\(\boldsymbol{\epsilon}\)で動く別の慣性系から見た質点の速度は\(\dot{\boldsymbol{r}}’ = \dot{\boldsymbol{r}} + \boldsymbol{\epsilon}\)であるので、この慣性系からみた自由粒子のラグランジアン\(L’\)は、
$$
L’ = L(|\dot{\boldsymbol{r}} + \boldsymbol{\epsilon}|^2) = L(|\dot{\boldsymbol{r}}|^2) + \frac{\partial L}{\partial |\dot{\boldsymbol{r}}|^2} (2\dot{\boldsymbol{r}} \cdot \boldsymbol{\epsilon})
$$とかけるわけだが、ここで次の2つの方程式から出てくる数式は同じでなくてはならない。
$$
\frac{\partial L}{\partial q_i} – \frac{d}{dt} \frac{\partial L}{\partial \dot{q}_i} =0 \qquad \frac{\partial L’}{\partial q_i} – \frac{d}{dt} \frac{\partial L’}{\partial \dot{q}_i} =0
$$親記事の定理2.5より、ラグランジアンに任意の関数\(G(\boldsymbol{q},t)\)の時間微分だけの不定性があっても、オイラー=ラグランジュ方程式の結果は変わらないことを用いると、
$$
L’ – L =\frac{\partial L}{\partial |\dot{\boldsymbol{r}}|^2} (2\dot{\boldsymbol{r}} \cdot \boldsymbol{\epsilon})
$$が、ある関数の時間微分になっていればよいので、速度\(\dot{\boldsymbol{r}}\)が位置\(\boldsymbol{r}\)の時間微分であることをふまえると、\(\partial L / \partial |\dot{\boldsymbol{r}}|^2\)が質点に固有の定数\(C\)であればよいことになる。\(\partial L / \partial |\dot{\boldsymbol{r}}|^2 = C\)について、これを積分して、自由粒子のラグランジアンとして、\(L = C\dot|\dot{\boldsymbol{r}}|^2\)とかけると示された。□
では、拘束はないけれど、他の粒子や外部環境と相互作用を行う質点については、そのラグランジアンはどうなるでしょうか。答えとしては、
- 電磁気的な、有限の速度で伝わって過去の履歴や遅れが関与する相互作用
- 摩擦のように物体を構成する無数の原子の情報をマクロに丸めた相互作用
のようなものではない、古典力学で一般的な「無限大の速さで瞬間的に伝わるとみなせ、エネルギーの散逸を考えずにミクロのレベルで正しい相互作用」を行う質点のラグランジアンであれば、各粒子の座標だけに依存するある関数\(F(\boldsymbol{r})\)を、自由な質点のラグランジアンに付け加えることによって表すことができます。少し天下り的に思えるかもしれませんが、これも古典力学の要請です。
つまり多くの場合で、古典力学における他の粒子や外部環境と相互作用を行う質点のラグランジアン\(L(\boldsymbol{r}, \dot{\boldsymbol{r}}, t)\)は、速度\(\dot{\boldsymbol{r}}\)のみの関数\(K(\dot{\boldsymbol{r}})=C|\dot{\boldsymbol{r}}|^2 \)および、位置\(\boldsymbol{r}\)のみの関数\(F(\boldsymbol{r})\)を用いて、\(L(\boldsymbol{r}, \dot{\boldsymbol{r}}, t) = K (\dot{\boldsymbol{r}}) + F ( \boldsymbol{r} )\)とかけることが分かりました。
ここで、古典力学ではニュートンの運動方程式が支配方程式なのだから、わざわざこのような方法でラグランジアンを求めずとも、ニュートンの運動方程式から逆算すれば\(L(\boldsymbol{r}, \dot{\boldsymbol{r}}, t) = K (\dot{\boldsymbol{r}}) + F ( \boldsymbol{r} )\)が出てくるのでは、という疑問を持たれる読者もいるでしょう。
それは非常に正しいのですが、この節でやっているのは、もし仮に古典力学における支配方程式を知らなかったときに、時間の一様性、空間の一様性、空間の等方性、そしてガリレイの相対性原理という、要請される対称性のみを根拠にラグランジアンを組み立てるならどういうものがふさわしいだろうか、という前提での議論であるということにさせてください。
2 オイラー=ラグランジュ方程式を解く
以上の議論で導いたラグランジアンですが、このラグランジアンをオイラー=ラグランジュ方程式に代入して解いた結果として出てくる方程式は、もちろんニュートンの運動方程式でなくてはなりません。
実際に確かめてみましょう。
定理2.2
ラグランジアン\(L(\boldsymbol{r}, \dot{\boldsymbol{r}}, t)=K (\dot{\boldsymbol{r}}) + F ( \boldsymbol{r} )\)をオイラー=ラグランジュ方程式に代入した結果は、
$$
\sum_{i=1}^3 2C \ddot{x}_i \frac{\partial x_i}{\partial q_j} = \frac{\partial F}{\partial q_j} \quad (j=1,2,3)
$$となる。ただし質点の位置を定める座標として、直交座標を\((x_1,x_2,x_3)\)、一般化座標を\((q_1,q_2,q_3)\)とする。
定理2.2の証明
先に準備として(a),(b)式を与える。
まず直交座標\(x_i\)は一般化座標\(\boldsymbol{q}\)と時間\(t\)の関数\(x_i(\boldsymbol{q}, t)\)として表されるので、これを時間で微分すると、速度\(\dot{x}_i\)は合成関数の微分より、
$$
\dot{x}_i = \frac{d x_i}{dt} = \sum_{j=1}^N \frac{\partial x_i}{\partial q_j} \frac{d q_j}{dt} + \frac{\partial x_i}{\partial t} \frac{dt}{dt} = \sum_{j=1}^N \frac{\partial x_i}{\partial q_j}\dot{q}_j + \frac{\partial x_i}{\partial t}
$$とかける。この\(\dot{x}_i\)を\(\dot{q}_k\)以外を定数とみなして偏微分すると、\(x_i\)は\(\boldsymbol{q}\)と時間\(t\)の関数であるため、\(\frac{\partial x_i}{\partial q_j}\)や\(\frac{\partial x_i}{\partial t}\)は\(\dot{\boldsymbol{q}}\)を引数に含まないから、合成関数の微分より、
$$
\frac{\partial \dot{x}_i}{\partial \dot{q}_k} = \frac{\partial}{\partial \dot{q}_k} \left( \sum_{j=1}^N \frac{\partial x_i}{\partial q_j}\dot{q}_j + \frac{\partial x_i}{\partial t} \right) = \frac{\partial x_i}{\partial q_k} \qquad \text{(a)}
$$が成り立つ。また(a)式の右辺、\(\partial x_i/\partial q_k\)を時間微分すると、これは\(\boldsymbol{q}\)と時間\(t\)の関数であるため、合成関数の微分より、
$$
\frac{d}{dt} \left( \frac{\partial x_i}{\partial q_k} \right) = \sum_{j=1}^N \frac{\partial}{\partial q_j} \frac{\partial x_i}{\partial q_k} \frac{d q_j}{dt} + \frac{\partial}{\partial t} \frac{\partial x_i}{\partial q_k} \frac{dt}{dt} = \frac{\partial}{\partial q_k} \left( \sum_{j=1}^N \frac{\partial x_i}{\partial q_j} \frac{d q_j}{dt} + \frac{\partial x_i}{\partial t} \right) = \frac{\partial \dot{x}_i}{\partial q_k} \qquad \text{(b)}
$$が成り立つことがわかる。では、式(a),(b)を与えたので証明に入る。
ラグランジアン\(L(\boldsymbol{r}, \dot{\boldsymbol{r}}, t)=K (\dot{\boldsymbol{r}}) + F ( \boldsymbol{r} )\)に対して、
$$
\frac{d}{dt} \left( \frac{\partial L}{\partial \dot{q}_j} \right) – \frac{\partial L}{\partial q_j} = 0 \quad (j=1,2,3)
$$を計算する。\(L(\boldsymbol{r}, \dot{\boldsymbol{r}}, t) = K (\dot{\boldsymbol{r}}) + F ( \boldsymbol{r} )\)を用いて変形すると、
$$
\frac{d}{dt} \left( \frac{\partial K}{\partial \dot{q}_j} \right) – \frac{\partial K}{\partial q_j} = -\frac{d}{dt}\left(\frac{\partial F}{\partial \dot{q}_j}\right) + \frac{\partial F}{\partial q_j} \quad (j=1,2,3)
$$とかける。この左辺について変形すると、
$$
\text{左辺} = \sum_{i=1}^3 \left[ \frac{d}{dt}\left( 2C \dot{x}_i \frac{\partial \dot{x}_i}{\partial \dot{q}_j} \right) – 2C \dot{x}_i \frac{\partial \dot{x}_i}{\partial q_j} \right] = \sum_{i=1}^3 \left[ \frac{d}{dt}\left( 2C \dot{x}_i \frac{\partial x_i}{\partial q_j} \right) – 2C \dot{x}_i \frac{d}{dt}\left( \frac{\partial x_i}{\partial q_j} \right) \right] = \sum_{i=1}^3 2C \ddot{x}_i \frac{\partial x_i}{\partial q_j}
$$となる。ただし、1つ目の等号は\(K\)の定義式、2つ目の等号は(a)式と(b)式、3つ目の等号は積の微分公式をそれぞれ用いている。
右辺については、\(F\)は位置\(\boldsymbol{r}\)のみの関数であったため、\(\dot{q}_j\)には依存しないことから、
$$
\text{右辺} = -\frac{d}{dt}\left(\frac{\partial F}{\partial \dot{q}_j}\right) + \frac{\partial F}{\partial q_j} = \frac{\partial F}{\partial q_j}
$$となる。ゆえに、示された。□
定理2.2の結果の式をさらに計算していくと、次のようになります。
系2.3
ラグランジアン\(L(\boldsymbol{r}, \dot{\boldsymbol{r}}, t)=K (\dot{\boldsymbol{r}}) + F ( \boldsymbol{r} )\)をオイラー=ラグランジュ方程式に代入した結果は、\(2C \ddot{x}_i = \partial F/\partial x_i (i=1,2,3)\)となる。ただし質点の位置を定める座標として、直交座標を\((x_1,x_2,x_3)\)とする。
系2.3の証明
定理2.2の結果の式に対して、右辺をさらに変形すると、合成関数の微分法より、
$$
\frac{\partial F}{\partial q_j} = \sum_{i=1}^3 \frac{\partial F}{\partial x_i} \frac{\partial x_i}{\partial q_j}
$$となる。これをもとの式に代入して、右辺を左辺に移項してくくると、
$$
\sum_{i=1}^3 \left( 2C \ddot{x}_i – \frac{\partial F}{\partial x_i} \right) \frac{\partial x_i}{\partial q_j} = 0 \quad (j=1,2,3)
$$すなわち、\(2C \ddot{x}_i = \partial F/\partial x_i \quad (i=1,2,3)\)となるから、示された。□
系2.3の結果の式は、「質点は位置に依存する関数\(F(\boldsymbol{r})\)の傾きに比例した加速度を生じ、その比例定数は質点に依存する」という主張を表していて、これはニュートンの運動方程式に他なりません。したがって、ここで実際にここまでしてきた議論は正しかったことが、確かめられました。
系2.3の結果の式とニュートンの運動方程式を比較することで、ここでの定数\(2C\)と関数\(F(\boldsymbol{r})\)は、古典力学での質量\(m\)とポテンシャルエネルギーの逆符号\(-U(\boldsymbol{r})\)に一致することが分かります。そのため一般に、
古典力学における、他の粒子や外部環境と相互作用を行う質点のラグランジアン\(L(\boldsymbol{r}, \dot{\boldsymbol{r}}, t)\)は、ポテンシャルエネルギーが定義できるとき、(運動エネルギー)\(-\)(ポテンシャルエネルギー)を採用できる。
ということが分かりました。
3 方程式を解かなくてもわかること①―保存量
ではここからは、力学系のラグランジアンとして、(運動エネルギー)\(-\)(ポテンシャルエネルギー)を採用できる場合に、これにネーターの定理を適用することを考えてみましょう。
定理2.4(運動量保存則)
力学系のラグランジアンとして、速度\(\dot{\boldsymbol{r}}\)のみの関数\(K(\dot{\boldsymbol{r}})=m|\dot{\boldsymbol{r}}|^2/2 \)および、位置\(\boldsymbol{r}\)のみの関数\(V(\boldsymbol{r})\)を用いた、\(K-V\)を採用できるとき、系が直交座標の\(x_i\)軸方向に空間並進対称性をもつならば、古典力学で定義した運動量の\(x_i\)成分\(m \dot{x}_i\)が保存する。
定理2.4の証明
系に、\(x_i\)方向への無限小平行移動に対する対称性があるから、系2.7より、
$$
\frac{\partial L}{\partial \dot x_i}= \frac{\partial K}{\partial \dot x_i} = \frac{\partial}{\partial \dot x_i} \left( m\sum_{i=1}^3 \dot{x_i}^2/2 \right) = m \dot{x}_i
$$が保存するとして示された。□
定理2.5(力学的エネルギー保存則)
力学系のラグランジアンとして、速度\(\dot{\boldsymbol{r}}\)のみの関数\(K(\dot{\boldsymbol{r}})=m|\dot{\boldsymbol{r}}|^2/2 \)および、位置\(\boldsymbol{r}\)のみの関数\(V(\boldsymbol{r})\)を用いた、\(K-V\)を採用できるとき、古典力学で定義した力学的エネルギー\(K+V\)が保存する。
定理2.5の証明
系に、時間並進に対する対称性があるから、系2.8より、
$$
\sum_{i=1}^3 \frac{\partial L}{\partial \dot{x}_i} \dot{x}_i – L = \left( m\sum_{i=1}^3 \dot{x_i}^2 \right) -\left( m\sum_{i=1}^3 \dot{x_i}^2/2 – V\right) = \left( m\sum_{i=1}^3 \dot{x_i}^2/2 \right) + V = K+V
$$が保存するとして示された。□
定理2.6(角運動量保存則)
力学系のラグランジアンとして、速度\(\dot{\boldsymbol{r}}\)のみの関数\(K(\dot{\boldsymbol{r}})=m|\dot{\boldsymbol{r}}|^2/2 \)および、位置\(\boldsymbol{r}\)のみの関数\(V(\boldsymbol{r})\)を用いた、\(K-V\)を採用できるとき、系が\(x_i\)方向を軸とする空間回転対称性をもつならば、古典力学で定義した角運動量の\(x_i\)成分\( \boldsymbol{e}_i \cdot \left\{ \boldsymbol{r} \times \left( m\dot{\boldsymbol{r}} \right) \right\} \)が保存する
定理2.6の証明
系に、\(x_i\)方向を軸とする無限小空間回転に対する対称性があるから、系2.9より、
$$
\boldsymbol{e}_i \cdot \left\{ \boldsymbol{r} \times \left( \nabla_{\dot{\boldsymbol{r}}} L \right) \right\} = \boldsymbol{e}_i \cdot \left\{ \boldsymbol{r} \times (m/2) \left( \nabla_{\dot{\boldsymbol{r}}} \sum_{i=1}^3 x_i^2 \right) \right\} = \boldsymbol{e}_i \cdot \left\{ \boldsymbol{r} \times \left( m\dot{\boldsymbol{r}} \right) \right\}
$$が保存するとして示された。□
どうでしょうか。古典力学にはじめて触れたときは、ニュートンの運動方程式を変形して一つずつ見つけていた保存量ですが、解析力学の形式を用いると、いとも簡単に示すことができましたね。
4 方程式を解かなくてもわかること②―運動の概形
さらに、ここからは話を変えて、ラグランジアンとして(運動エネルギー)\(-\)(ポテンシャルエネルギー)を採用できる場合に、オイラー=ラグランジュ方程式によって完全な運動を解かずとも、ポテンシャルによって運動の大体の様子を把握することができないか、ということを考えます。
物理や工学においてこれは非常に有効であるので、本稿ではポテンシャルから運動の概形を把握する議論について見ていきましょう。以下の定理をご覧ください。
定理2.7
力学系のラグランジアンとして、速度\(\dot{\boldsymbol{r}}\)のみの関数\(K(\dot{\boldsymbol{r}})=m|\dot{\boldsymbol{r}}|^2/2 \)および、位置\(\boldsymbol{r}\)のみの関数\(V(\boldsymbol{r})\)を用いた、\(K-V\)を採用できるとき、時間変化しない定数\(K+V\)の値を\(E\)とすると、運動する領域は\(V \le E\)の範囲のみに限られる。
定理2.7の証明
定理2.5より、系に時間並進対称性があるならば、物理量
$$
\left( \frac{\partial L}{\partial \dot{x}} \dot{x} +\frac{\partial L}{\partial \dot{y}} \dot{y}+\frac{\partial L}{\partial \dot{z}} \dot{z}\right) – L = m(\dot{x}^2 + \dot{y}^2 + \dot{z}^2) -\left( \frac{m}{2}(\dot{x}^2 + \dot{y}^2 + \dot{z}^2) – V\right) = \frac{m}{2}(\dot{x}^2 + \dot{y}^2 + \dot{z}^2) + V = K+V
$$が時間変化に対して保存する。ここで、この定数\(K+V\)の値を\(E\)とすると、\(K=\sum_{i=1}^N (m_i \dot{x_i}^2 /2) \)は平方和より非負であるから、たしかに運動する領域は\(K=E-V \ge 0\)、すなわち\(V \le E\)の範囲のみに限られる。□
定理2.8
力学系のラグランジアンとして、速度\(\dot{\boldsymbol{r}}\)のみの関数\(K(\dot{\boldsymbol{r}})=m|\dot{\boldsymbol{r}}|^2/2 \)および、位置\(\boldsymbol{r}\)のみの関数\(V(\boldsymbol{r})\)を用いた、\(K-V\)を採用できるとき、\(\nabla_{\boldsymbol{q}} V= \boldsymbol{0}\)なる位置\(\boldsymbol{q}=\boldsymbol{q}_0\)が平衡点である、つまり位置\(\boldsymbol{q}=\boldsymbol{q}_0\)に速度ゼロで置かれた質点の加速度\(\ddot{\boldsymbol{q}} \)はゼロとなる。
定理2.8の証明
点変換で対応する独立な座標系ならどんな一般化座標の取り方であっても、オイラー=ラグランジュ方程式が成り立って同じ運動を解として与えるので、代表して直交座標\(\boldsymbol{x}= (x_1, x_2, \dots, x_N)\)において成り立っていればよい。ここで、定理2.8で仮定した一般化座標\(\boldsymbol{q}=\boldsymbol{q}_0\)でのポテンシャルの勾配\(\nabla_{\boldsymbol{q}} V\)が\(\boldsymbol{0}\)であることは、
$$
\frac{\partial V}{\partial q_j} = \sum_{i=1}^N \frac{\partial V}{\partial x_i} \frac{\partial x_i}{\partial q_j}=0
$$であることと、座標変換のヤコビ行列(\(\frac{\partial x_i}{\partial q_j}\)を並べた行列)が逆行列をもつことから、対応する直交座標での位置一般化座標\(\boldsymbol{x}=\boldsymbol{x}_0\)における\(\nabla_{\boldsymbol{x}} V\)が\(\boldsymbol{0}\)であることに等価である。
さて、直交座標によるラグランジアン\(K=\sum_{i=1}^N (m_i \dot{x_i}^2 /2) \)をオイラー=ラグランジュ方程式に入れると、
$$
m_i \ddot{x}_i = – \frac{\partial V}{\partial x_i}
$$とかけるので、\(\nabla_{\boldsymbol{x}} V|_{\boldsymbol{x}=\boldsymbol{x}_0} = \boldsymbol{0}\)をふまえると、\(m_i \boldsymbol{\ddot{x}}|_{\boldsymbol{x}=\boldsymbol{x}_0} = 0\)、すなわち\(\ddot{\boldsymbol{x}}|_{\boldsymbol{x}=\boldsymbol{x}_0} =\boldsymbol{0}\)である。よって、たしかに位置\(\boldsymbol{x}=\boldsymbol{x}_0\)に速度ゼロで置かれた質点の加速度\(\ddot{\boldsymbol{x}} \)はゼロとなるから、この位置は平衡点である。□
定理2.9
力学系のラグランジアンとして、速度\(\dot{\boldsymbol{r}}\)のみの関数\(K(\dot{\boldsymbol{r}})=m|\dot{\boldsymbol{r}}|^2/2 \)および、位置\(\boldsymbol{r}\)のみの関数\(V(\boldsymbol{r})\)を用いた、\(K-V\)を採用できるとき、定理2.8にしたがって平衡点\(\boldsymbol{q}=\boldsymbol{q}_0\)を求めることができる。ここで、
\(\frac{\partial^2 V}{\partial q_i^2}|_{\boldsymbol{q}=\boldsymbol{q}_0} \ge 0\)ならばその平衡点は変数\(q_i\)のずれに対して安定、
\(\frac{\partial^2 V}{\partial q_i^2}|_{\boldsymbol{q}=\boldsymbol{q}_0} \le 0\)ならばその平衡点は変数\(q_i\)のずれに対して不安定である。
定理2.9の証明
平衡点\(\boldsymbol{q}=\boldsymbol{q}_0\)から\(q_i\)方向に微小\(\delta q_i\)だけずれた位置\(\boldsymbol{q}_0 + \delta q_i \boldsymbol{e}_i\)におけるポテンシャルは、テイラー展開で2次の微小量まで残すと、
$$
V|_{\boldsymbol{q}=\boldsymbol{q}_0 + \delta q_i \boldsymbol{e}_i} = V_{\boldsymbol{q}=\boldsymbol{q}_0} + \frac{\partial^2 V}{\partial q_i^2}|_{\boldsymbol{q}=\boldsymbol{q}_0} (\delta q_i)^2
$$となる。\(L|_{{\boldsymbol{q}=\boldsymbol{q}_0 + \delta q_i \boldsymbol{e}_i}}=K-V|{{\boldsymbol{q}=\boldsymbol{q}_0 + \delta q_i \boldsymbol{e}_i}}\)について、オイラー=ラグランジュ方程式を計算すると、\(\frac{\partial^2 V}{\partial q_i^2}|_{\boldsymbol{q}=\boldsymbol{q}_0} \ge 0\)ならば、変数\(q_i\)に対して単振動型の運動方程式、\(\frac{\partial^2 V}{\partial q_i^2}|_{\boldsymbol{q}=\boldsymbol{q}_0} \le 0\)ならば、変数\(q_i\)に対して指数関数的に増加する運動方程式が出てくるため、示される。□
これらの定理から、ポテンシャル\(V\)のグラフを書くことで、おおまかな運動の様子を判断することができます。例えば、ポテンシャル\(V\)のグラフが以下のようだったとします。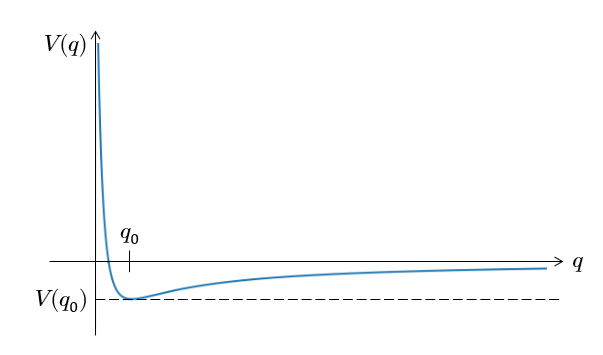
このときは、位置\(q=q_0\)において安定な平衡点を取り、時間変化しない定数\(K+V\)の値を\(E\)とすると、
\(E=V(q_0)\)ならば、変数\(q\)が一定の運動、
\(V< E < 0\)ならば、変数\(q\)がある閉じた範囲を動く運動、
\(0 \le E\)ならば、変数\(q\)が\(q \to \infty\)まで動くことができる運動を行うと判断できますね。
このように、オイラー=ラグランジュ方程式によって完全な運動を解かずとも、ポテンシャルによって運動の大体の様子を把握することは、物理の議論をするうえでとても重要になっていきますよ。
以上、解析力学を古典力学に適用するときの基礎となる内容を説明してみました。お疲れさまでした。
コメント